




























24
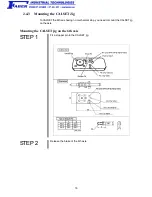
STEP 18
Press the EMERGENCY STOP button.
The robot brake becomes activated.
STEP 19
Turn the EMERGENCY STOP button to cancel robot stop.
STEP 20
Press the MOTOR to turn ON the power to the motor.
Caution: A "motor lock overload" error may occur just after the
power to the motor is turned ON. In this case, try to turn ON the
power several times, or release the brake, move the axis a little in the
opposite direction of the mechanical end, and turn ON the power
again.
STEP 21
Move the CALSETed axis in the opposite direction from the mechanical end
by the manual operation of the teach pendant.
STEP 22
Perform CAL. The single-axis CALSET of the specified axis is completed.
2.4.5.2
CALSETing All Axes
The CALSET of all axes is called all-axis CALSET.
The procedure is the same as that for single-axis CALSET except that you should
select all axes for brake release and CALSET in Steps 9 and 15. For details of the
procedure, see "CALSETing a Single Axis."
Содержание VP-5243G
Страница 1: ...ROBOT Vertical articulated VP G SERIES INSTALLATION MAINTENANCE GUIDE ...
Страница 26: ...20 STEP 7 Press the SHIFT key and F12 Maint F12 STEP 8 Press F3 Brake F3 ...
Страница 47: ...41 STEP 3 The user counter of the controller ON time has been reset to zero as shown below ...
Страница 54: ......