





























Configuration & control of the AC SuperDrive
26.04.2005
The speed and the torque have the same sign if power is fed from the ACS to the motor. If the
speed and the torque have opposite signs, the power is fed from the motor to the ACS
(regeneration). From that follows that if the Actual Speed and the Torque Current has the same
sign, the maximum amplitude is given by the parameter Max Acceleration Torque Current in
. With opposite signs on the Actual Speed and the Torque Current, the maximum
amplitude is given by the parameter Max Brake Torque Current.
The derivate of the Torque Current is limited in order to avoid noise and unnecessary wear in
couplings and gearboxes. The maximum allowed Torque Current derivate is controlled with the
parameter Max Torque Current Change.
Index
Sub-
Index
Name
Description
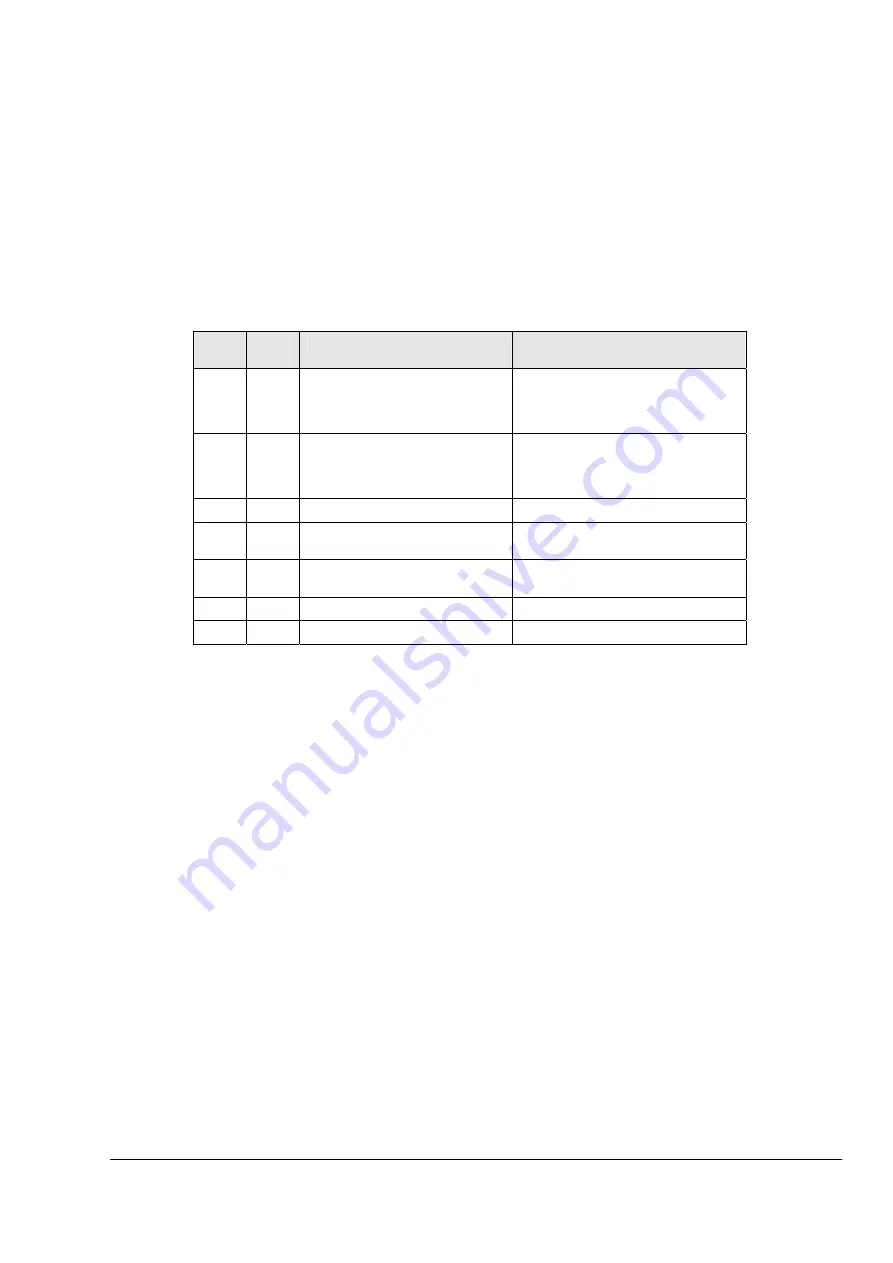
2095h
1
Max Acceleration Torque Current
Sets both Forward and Reverse Max
Acceleration Torque Currents to the
same value.
Unit: ARMS
2095h
2
Max Brake Torque Current
Sets both Forward and Reverse Max
Brake Torque Currents to the same
value.
Unit: ARMS
2095h
3
Max Torque Current Change
Unit : deciARMS/ms
2095h
5
Forward Max Acceleration Torque
Current
Unit : ARMS
2095h
6
Reverse Max Acceleration Torque
Current
Unit : ARMS
2095h
7
Forward Max Brake Torque Current
Unit : ARMS
2095h
8
Forward Max Brake Torque Current
Unit : ARMS
Table 17. Torque Current Limitation – Parameters.
6.6.1 T
UNING OF SPEED CONTROL
Tuning of parameters in the Speed Control determines the response characteristics for the AC
SuperDrive's Speed Control.
6.6.1.1 T
UNING IN PARAMETER OR
PDO
CONTROLLED RAMP
MODE
With Speed Control Mode equal to Parameter or PDO Controlled Ramp mode, the optimum
response for various operating conditions (i.e. slow speed, high speed, braking, holding) is
mainly tuned with the acceleration and deceleration values, i.e.
•
PDO Controlled Ramp: Command Acceleration and Command Deceleration that are set by
the truck controller.
•
Parameter Controlled Ramp: Ramp Parameters in
The values to be used are normally determined by the operating requirements for the vehicle.
Usually it is not necessary to utilize the four sets of Speed PI Controller parameters, which
means that Set 0 can be used all time. It means that bit 4 and 5 in the Command Word should be
equal to zero. The default Speed PI Controller parameters (
P-gain, I-gain (Small,
Medium and Large
)
are near optimum for the majority of applications and normally do not
require further adjustment. However, optimum values can be established empirically by
Item No.
89Y05120A
User's Guide 1.0
54
Содержание SuperDrive ACS24 Series
Страница 12: ......
Страница 34: ......
Страница 38: ......
Страница 79: ...26 04 2005 Troubleshooting guide User s Guide 1 0 Item No 89Y05120A 79...
Страница 81: ...26 04 2005 Troubleshooting guide User s Guide 1 0 Item No 89Y05120A 81...
Страница 82: ...Troubleshooting guide 26 04 2005 Item No 89Y05120A User s Guide 1 0 82...
Страница 86: ...Troubleshooting guide 26 04 2005 7 7 11 CAN TIME OUT Error Code 0x8100 Item No 89Y05120A User s Guide 1 0 86...
Страница 92: ......







































































