





























31
Installation and Operation Manual
X-DPT-Profibus-Interface-eng
PN 541-C-068-AAG
November, 2008
4.5 DIAGNOSTIC
4.5.1 Device diagnostic Message
Any Smart TMF series device features extensive diagnostics capabilities. Access
to this information is provided through the Profibus-DP defined diagnostics mes-
sage. In the start-up state, when connected to the network and prior to entering the
data exchange state, the device will generate two diagnostic messages: one right
after power up to notify the master of its presence on the network, and one after
successful configuration check, to notify the master that the system is ready for
regular data exchange.
A device diagnostics message send by a Smart TMF series device will at least
contain the 6 bytes of mandatory diagnostics as defined by the standard. Refer to
EN 50170, part 3, section 8.3.1.:
Read DP-slave diagnostic information
for a de-
tailed description of these first 6 bytes. If the device has no error or alarm to report,
no further extended diagnostic bytes are send to the master. The mere absence of
extended diagnostics information indicates “No errors to report”
,
thus limiting the
burden on the network to a minimum.
In case if one of the errors occurs (or changes), a complete diagnostics message,
including also the bytes indicating the other categories will send to the master
after the next data exchange message.
Table 5-1 below summarizes the diagnostic data bytes to be send at the event of
an error (change). If all bits in all bytes are 0, these data bytes will not be send. A
short message indicates “no errors”. The data bytes are send left to right, i.e. byte
0 is send first.
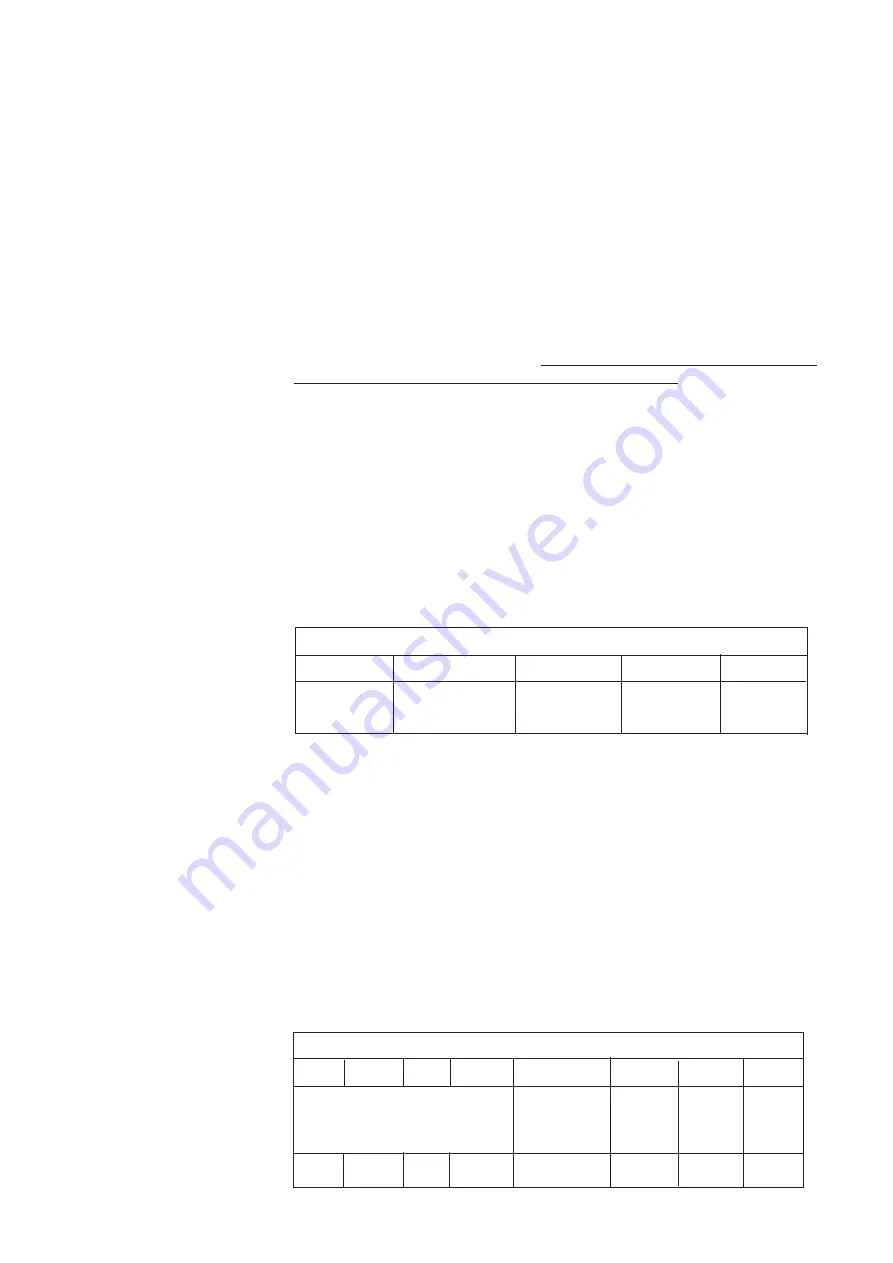
Table 5-1: Diagnostics message, extended data section layout.
Diagnostics message – Extended data section*
* These bytes are only send if one of the bits is set to 1.
Each of the error/alarm bytes is explained in the next sections.
4.5.2 Run-time message errors
Table 5-2 below shows the bit-mapped alarm bits of the first extended diagnos-
tics byte, the Run-time message errors. These error bits are used to notify the
master, that one (or more) of the command settings, has been ignored for some
reason. The errors are non-fatal, i.e. the device will continue to function as
before, but the command involved is ignored. Refer also to section 4.6 for an
explanation of the valid command byte selection codes.
Table 5-2: Diagnostics: Run-time message error bits.
Diagnostics byte 0: Run-time message errors
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1*
Bit 0
Device busy
Invalid
Invalid
Invalid
Reserved
command
totalizer
VOR
EEPROM
ignored
command command
command
0
0
0
0
0=OK
0=OK
0=OK
0=OK
1=Alarm
1=Alarm
1=Alarm
1=Alarm
* This error will also be set if the slave device is a meter model, and a non-zero valve
override command is given.
Byte 0
Run-time
message errors
Byte 1
Fatal system
errors
Byte 2
Primary
non-fatal system
errors
Byte 3
Secondary
non-fatal system
errors
Byte 4
Non-fatal
ambient errors







































































