
























Section 1
General Information
3-10 Receiving & Installation
MN718
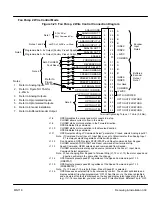
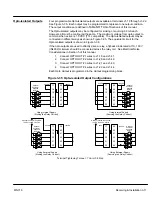
Figure 3-34 Opto-Input Equivalent Circuit (Using External Supply)
9
10
11
12
13
14
15
16
Opto Input 2
Opto Input 3
Opto Input 4
Opto Input 5
Opto Input 6
Opto Input 7
J1
Terminal Tightening Torque = 7 Lb-in (0.8 Nm).
Opto Input 8
Opto Input 9
39
40
17
8
Opto Input 1
*
User VCC = 10 - 30VDC
External Power Source
*
User VCC (–)
*
User VCC (+)
9
10
11
12
13
14
15
16
Opto Input 2
Opto Input 3
Opto Input 4
Opto Input 5
Opto Input 6
Opto Input 7
J1
Opto Input 8
Opto Input 9
39
40
17
8
Opto Input 1
*
User VCC (+)
*
User VCC (–)
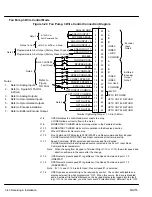
Opto Inputs Closing to Ground
Opto Inputs Closing to +VCC
Содержание 18H Series
Страница 1: ...SERIES 18H AC Flux Vector Control Installation Operating Manual 9 97 MN718 VECTOR DRIVE ...
Страница 105: ...Section 1 General Information 5 18 Troubleshooting MN718 ...
Страница 109: ...Section 1 General Information 6 4 Manual Tuning the Series 18H Control MN718 ...
Страница 144: ...Appendix C Appendix C 1 MN718 ...







































































