





















Section 1
General Information
Specifications, Ratings & Dimensions 7-9
MN718
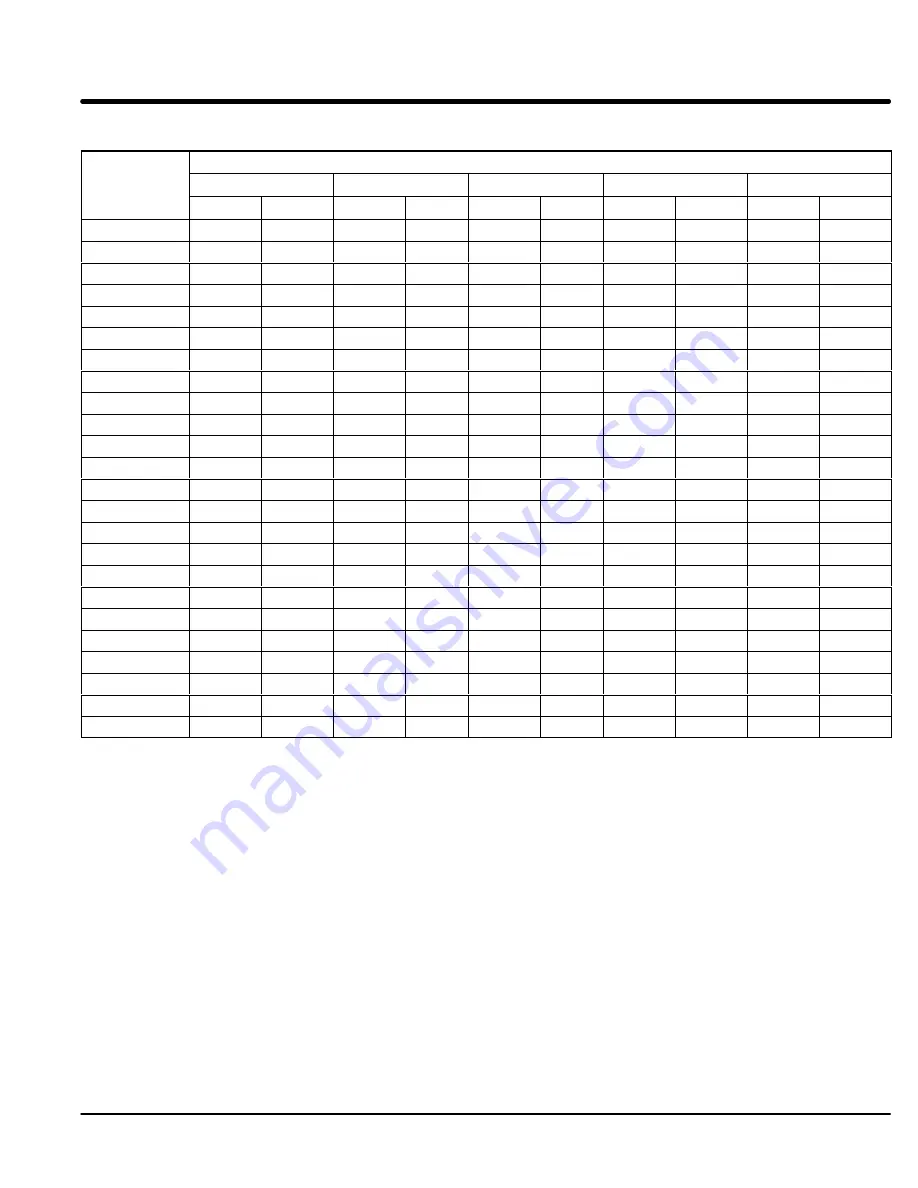
Table 7-4 Tightening Torque Specifications
Continued
Tightening Torque
575 VAC
C t l
N
Power TB1
Ground
Control J1
B+/R1; B+; B–; or R2
D1/D2
575 VAC
Catalog No.
Lb-in
Nm
Lb-in
Nm
Lb-in
Nm
Lb-in
Nm
Lb-in
Nm
ZD18H501–E
8
0.9
15
1.7
7
0.8
8
0.9
–
–
ZD18H502–E
8
0.9
15
1.7
7
0.8
8
0.9
–
–
ZD18H503–E
8
0.9
15
1.7
7
0.8
8
0.9
–
–
ZD18H505–E
8
0.9
15
1.7
7
0.8
8
0.9
–
–
ZD18H507–E
20
2.5
20
2.5
7
0.8
20
2.5
–
–
ZD18H510–E
20
2.5
20
2.5
7
0.8
20
2.5
–
–
ZD18H515–E
20
2.5
20
2.5
7
0.8
20
2.5
–
–
ZD18H515–EO
35
4
20
2.5
7
0.8
35
4
3.5
0.4
ZD18H515–ER
35
4
20
2.5
7
0.8
35
4
–
–
ZD18H520–EO
35
4
20
2.5
7
0.8
35
4
3.5
0.4
ZD18H520–EO
35
4
50
5.6
7
0.8
35
4
3.5
0.4
ZD18H525–EO
35
4
50
5.6
7
0.8
35
4
3.5
0.4
ZD18H525–ER
35
4
50
5.6
7
0.8
35
4
–
–
ZD18H530–EO
35
4
50
5.6
7
0.8
35
4
3.5
0.4
ZD18H530–ER
35
4
50
5.6
7
0.8
35
4
–
–
ZD18H540–EO
35
4
50
5.6
7
0.8
35
4
3.5
0.4
ZD18H540–ER
35
4
50
5.6
7
0.8
35
4
–
–
ZD18H550–EO
35
4
50
5.6
7
0.8
35
4
3.5
0.4
ZD18H550–ER
35
4
50
5.6
7
0.8
35
4
–
–
ZD18H560–EO
35
4
50
5.6
7
0.8
35
4
3.5
0.4
ZD18H560–ER
35
4
50
5.6
7
0.8
35
4
–
–
ZD18H575–EO
20 - 30
2.5 - 3.5
50
5.6
7
0.8
20 - 30
2.5 - 3.5
3.5
0.4
ZD18H5100–EO
20 - 30
2.5 - 3.5
50
5.6
7
0.8
20 - 30
2.5 - 3.5
3.5
0.4
ZD18H5150V–EO
35 - 50
4 - 5.7
50
5.6
7
0.8
35 - 50
4 - 5.7
3.5
0.4
Содержание 18H Series
Страница 1: ...SERIES 18H AC Flux Vector Control Installation Operating Manual 9 97 MN718 VECTOR DRIVE ...
Страница 105: ...Section 1 General Information 5 18 Troubleshooting MN718 ...
Страница 109: ...Section 1 General Information 6 4 Manual Tuning the Series 18H Control MN718 ...
Страница 144: ...Appendix C Appendix C 1 MN718 ...







































































