




























Coprocessor Interface
7-10
Copyright © 2000 ARM Limited. All rights reserved.
ARM DDI 0186A
7.5
CDP
CDP
instructions normally execute in a single cycle. Like all the previous cycles,
nCPMREQ
is driven LOW to signal when an instruction is entering the Decode and
then the Execute stage of the pipeline:
•
if the instruction really is to be executed, the
CPPASS
signal is driven HIGH
during the Execute cycle
•
if the coprocessor can execute the instruction immediately it drives
CHSDE[1:0]
with LAST
•
if the instruction requires a busy-wait cycle, the coprocessor drives
CHSDE[1:0]
with WAIT and then
CHSEX[1:0]
with LAST.
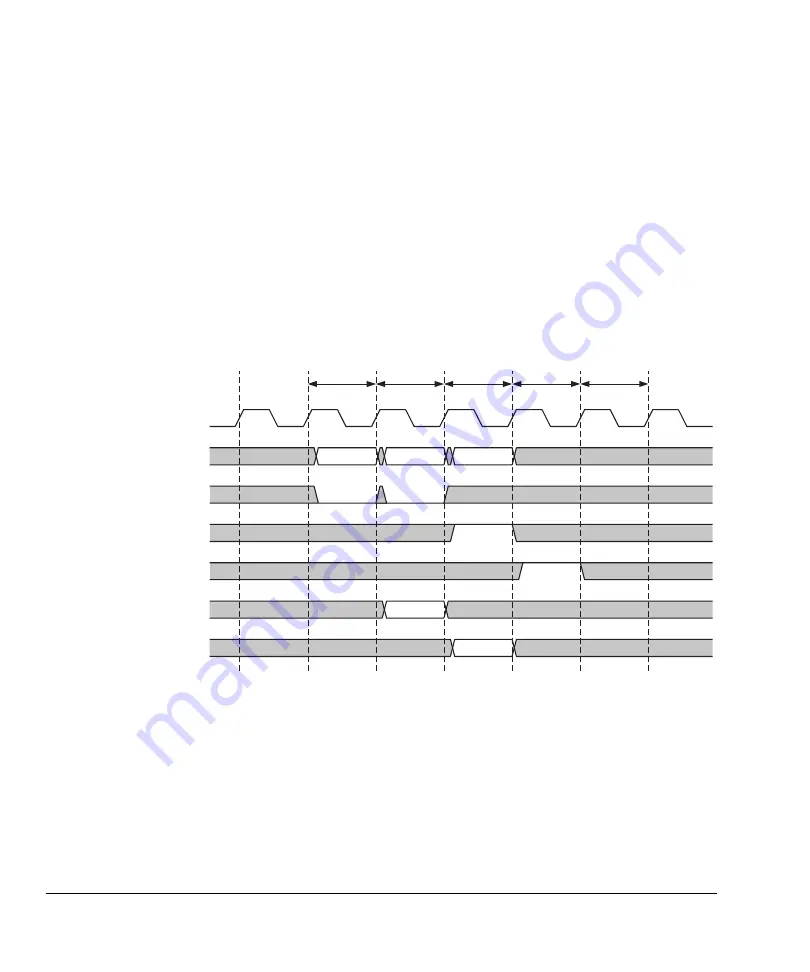
Figure 7-4 shows a cancelled
CDP
due to the previous instruction causing a Data Abort.
Figure 7-4 Late cancelled CDP
The
CDP
instruction enters the Execute stage of the pipeline and is signaled to execute
by
CPASS
. In the following cycle
CPLATECANCEL
is asserted. This causes the
coprocessor to terminate execution of the
CDP
instruction and for it to cause no state
changes to the coprocessor.
CLK
CPINSTR[31:0]
CPPASS
CHSEX[1:0]
CPLATECANCEL
CHSDE[1:0]
nCPMREQ
Fetch
Decode
Execute
Memory
(late cancelled)
Instruction
aborted
CPRT
LAST
Ignored
Coprocessor
pipeline
Содержание ARM966E-S
Страница 6: ...Contents vi Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 20: ...Introduction 1 4 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 48: ...Tightly coupled SRAM 4 12 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 80: ...Bus Interface Unit 6 20 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 118: ...Debug Support 8 26 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 130: ...Test Support 10 8 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 142: ...Instruction cycle timings 11 12 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 158: ...Signal Descriptions A 16 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 176: ...AC Parameters B 18 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...







































































