




























Signal Descriptions
A-10
Copyright © 2000 ARM Limited. All rights reserved.
ARM DDI 0186A
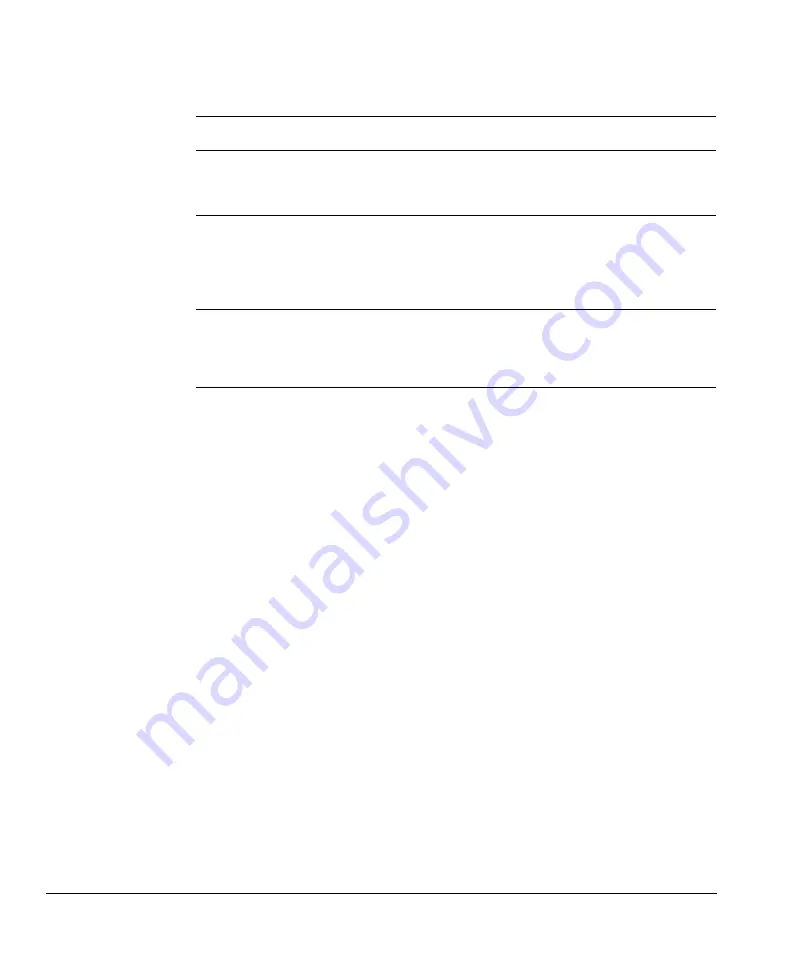
TAPID[31:0]
Boundary scan ID
code
Input
Specifies the ID code value shifted out on
DBGTDO
when the IDCODE instruction is entered into the
TAP controller.
DBGIEBKPT
Instruction
breakpoint
Input
Asserted by external hardware to halt execution of
the processor for debug purposes. If HIGH at the end
of an instruction fetch, it causes the ARM966E-S to
enter debug state if that instruction reaches the
Execute stage of the processor pipeline.
DBGDEWPT
Data watchpoint
Input
Asserted by external hardware to halt execution of
the processor for debug purposes. If HIGH at the end
of a data memory request cycle, it causes the
ARM966E-S to enter debug state.
Table A-4 Debug signals (continued)
Name
Direction
Description
Содержание ARM966E-S
Страница 6: ...Contents vi Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 20: ...Introduction 1 4 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 48: ...Tightly coupled SRAM 4 12 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 80: ...Bus Interface Unit 6 20 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 118: ...Debug Support 8 26 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 130: ...Test Support 10 8 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 142: ...Instruction cycle timings 11 12 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 158: ...Signal Descriptions A 16 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 176: ...AC Parameters B 18 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...







































































