




























40
–54
Software Manual EN
◼
SE-24
◼
01.06.2022
◼
V1.3
5.8.6 Settings
NOTE
The values in the “Settings” area only refer to the “Move OK” signal
which corresponds to the “move_ok” interface signal.
Detailed information about the functions are to be found in the
function description of the SE-24 operating instructions, chapter
“Function description”.
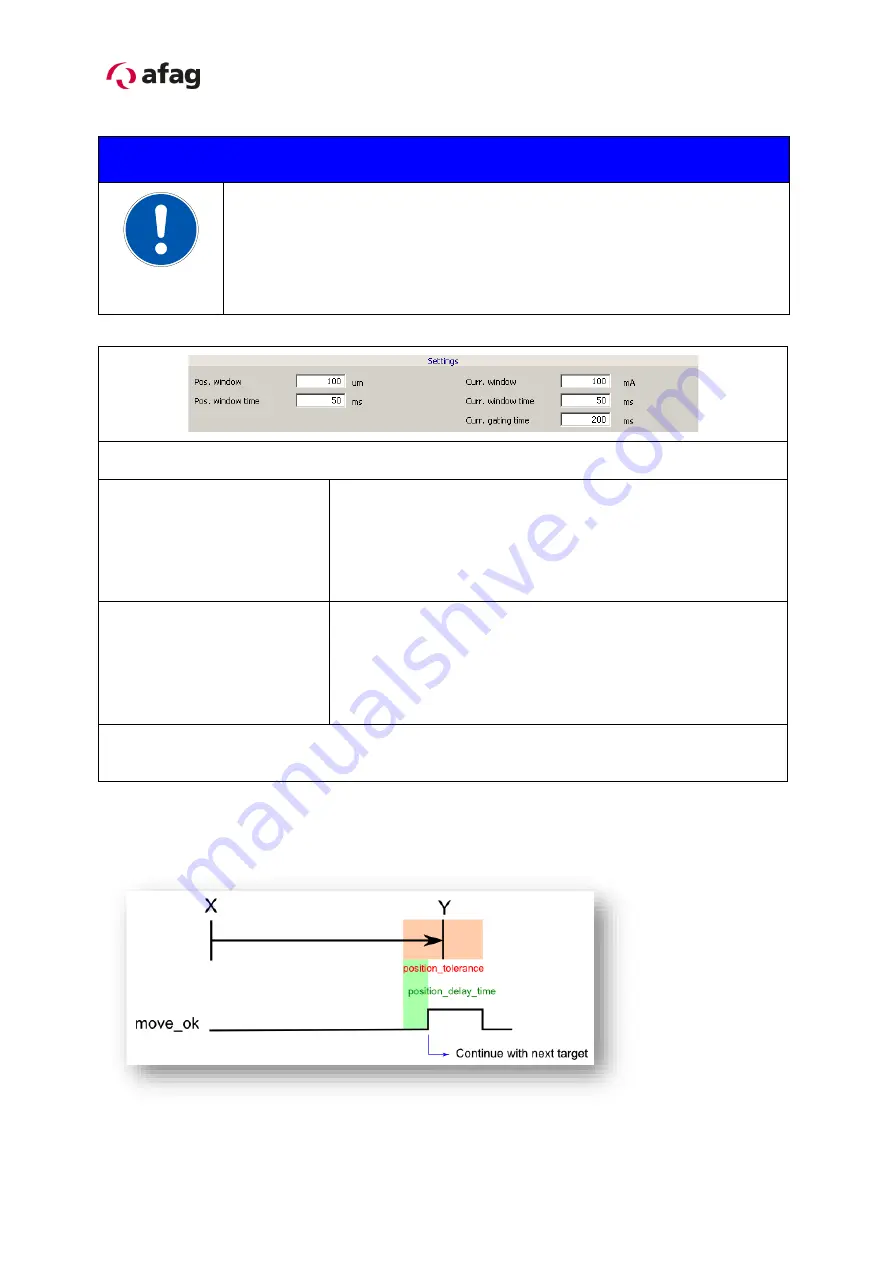
Settings for the “Move OK” signal in positioning mode.
Pos. window
This value corresponds to the tolerance for the positioning
window and is placed as a sym/- value around the
target position.
Comment: Double the value corresponds to the
“position_tolerance” value in Figure 3: Positioning mode.
Pos. window time
This value sets the delay time from the moment when the
actual position value is in the positioning window until the
“Move OK” signal is triggered.
Comment:
This
value
corresponds
to
the
“position_delay_time” in Figure 3: Positioning mode.
Comment:
The “Movement OK” signal is triggered when the delay time for the position in
the positioning window has passed.
X = position_value (actual position)
Y = target_position (target position)
Current = maximum current (from parameterization)
Figure 3: Positioning mode





















































