















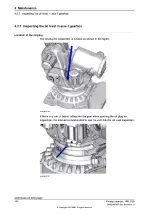














4.3.6 Inspecting the axis-1 mechanical stop
Location of mechanical stop pin
The mechanical stop is located as shown in the figure.
xx2200001771
Required equipment
Visual inspection, no tools are required.
Inspecting the mechanical stop pin
Use this procedure to inspect the axis-1 mechanical stop pin.
Note
Action
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the safeguarded
space.
1
Mechanical stop pin: 3HAC024014-
001
Inspect the axis-1 mechanical stop pin.
If the mechanical stop pin is bent or damaged, it
must be replaced.
Note
The expected life of gearboxes can be reduced
after collision with the mechanical stop.
2
Continues on next page
120
Product manual - IRB 6720
3HAC085697-001 Revision: C
© Copyright 2023 ABB. All rights reserved.
4 Maintenance
4.3.6 Inspecting the axis-1 mechanical stop
Содержание OmniCore IRB 6720
Страница 1: ...ROBOTICS Product manual IRB 6720...
Страница 2: ...Trace back information Workspace 23D version a13 Checked in 2023 12 07 Skribenta version 5 5 019...
Страница 8: ...This page is intentionally left blank...
Страница 14: ...This page is intentionally left blank...
Страница 54: ...This page is intentionally left blank...
Страница 184: ...This page is intentionally left blank...
Страница 584: ...This page is intentionally left blank...
Страница 608: ...This page is intentionally left blank...
Страница 614: ...This page is intentionally left blank...
Страница 639: ......





















































