




























Connecting Signals
Installation and Commissioning
62
Product Manual IRB 6400R
3.16.2 Sensors
Sensors are connected to one optional digital unit.
Technical data
See Product Specification IRB 6400, chapter 3.10.
The following sensors can be connected:
Sensor type
Signal level
Digital one bit sensors
High
“1”
Low
“0”
Digital two bit sensors
High
“01”
No signal
“00”
Low
“10”
Error status
“11” (stop program running)
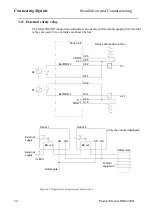
3.16.3 Connection and address keying of the CAN-bus
Figure 46 Example of connection of the CAN-bus
1. When the I/O unit is fitted inside the control cabinet (this is standard when choosing the
options on the Specification form), its CAN bus is connected to CAN1, X9 on the panel
unit (see 3.7). No termination is required when only CAN1 is used.
2. When the I/O unit is fitted outside the control cabinet, its CAN bus must be connected
to CAN3, X10 on the backplane of the control cabinet.
3. When the I/O unit is fitted on the manipulator, its CAN bus must be connected to CAN2,
X16 on the backplane of the control cabinet.
Panel unit:
X9
CAN1
Back plane:
X10
CAN3
X16
CAN2
Controller
X9/X10/X16. 1 0V_CAN
2 CAN_L
3 drain
4 CAN_H
5 24V_CAN
I/O unit
I/O unit
I/O unit
X5. 1
0V_CAN
2
CAN_L
3
drain
4
CAN_H
5
24V_CAN
X5. 1
2
3
4
5
120
Ω
Termination of
last unit
See Figure 47.
Содержание IRB 6400R
Страница 4: ...Description 20 Product Specification IRB 1400 M97A BaseWare OS 3 0 ...
Страница 6: ...Introduction 2 Product Manual ...
Страница 10: ...Introduction 6 Product Manual ...
Страница 12: ...Product Specification IRB 6400R 2 Product Specification IRB 6400R M99 BaseWare OS 3 2 ...
Страница 78: ...Accessories 68 Product Specification IRB 6400R M99 BaseWare OS 3 2 ...
Страница 80: ...Product Specification RobotWare 2 Product Specification RobotWare for BaseWare OS 3 2 ...
Страница 82: ...Introduction 4 Product Specification RobotWare for BaseWare OS 3 2 ...
Страница 104: ...Interbus S 3 2 26 Product Specification RobotWare for BaseWare OS 3 2 ...
Страница 110: ...I O Plus 3 2 32 Product Specification RobotWare for BaseWare OS 3 2 ...
Страница 128: ...PalletWare 50 Product Specification RobotWare for BaseWare OS 3 2 ...
Страница 132: ...Safety 2 Product Manual ...
Страница 148: ...System Description CONTENTS Page 2 Product Manual ...
Страница 158: ...Structure System Description 12 Product Manual ...
Страница 160: ...Computer System System Description 14 Product Manual ...
Страница 164: ...I O System System Description 18 Product Manual ...
Страница 168: ...Safety System System Description 22 Product Manual ...
Страница 170: ...External Axes System Description 24 Product Manual ...
Страница 174: ...Installation and Commissioning CONTENTS Page 4 Product Manual IRB 6400R ...
Страница 193: ...Installation and Commissioning On Site Installation Product Manual IRB 6400R 23 Figure 17 Cutting the cam Remove 90 30 ...
Страница 196: ...On Site Installation Installation and Commissioning 26 Product Manual IRB 6400R ...
Страница 270: ...Installing the Control Program Installation and Commissioning 100 Product Manual IRB 6400R ...
Страница 292: ...Maintenance CONTENTS Page 2 Product Manual IRB 6400R ...
Страница 299: ...Maintenance Product Manual IRB 6400R 9 Figure 4 Lubricating gearbox axis 1 4 3 1 2 ...
Страница 312: ...Troubleshooting Tools CONTENTS Page 2 Product Manual ...
Страница 350: ...Troubleshooting Tools 40 Product Manual ...
Страница 352: ...Fault tracing guide 2 Product Manual ...
Страница 362: ...Fault tracing guide 12 Product Manual ...
Страница 375: ...Motor units Repairs 12 Product Manual IRB 6400R ...
Страница 401: ...Arm System Repairs 38 Product Manual IRB 6400R ...
Страница 409: ...Cabling Repairs 46 Product Manual IRB 6400R ...
Страница 441: ...Special Tools List Repairs 80 Product Manual IRB 6400R ...
Страница 479: ...Part List and Spare Parts Product Manual IRB 6400R 38 ...
Страница 480: ...Part List and Spare Parts Product Manual IRB 6400R 39 ...
Страница 481: ...Part List and Spare Parts Product Manual IRB 6400R 40 ...





















































