





























66 Program features
IR compensation for a scalar controlled drive
IR compensation is active only when
the motor control mode is scalar. When
IR compensation is activated, the drive
gives an extra voltage boost to the
motor at low speeds. IR compensation
is useful in applications that require a
high break-away torque.
In Direct Torque Control (DTC), no IR
compensation is possible or needed.
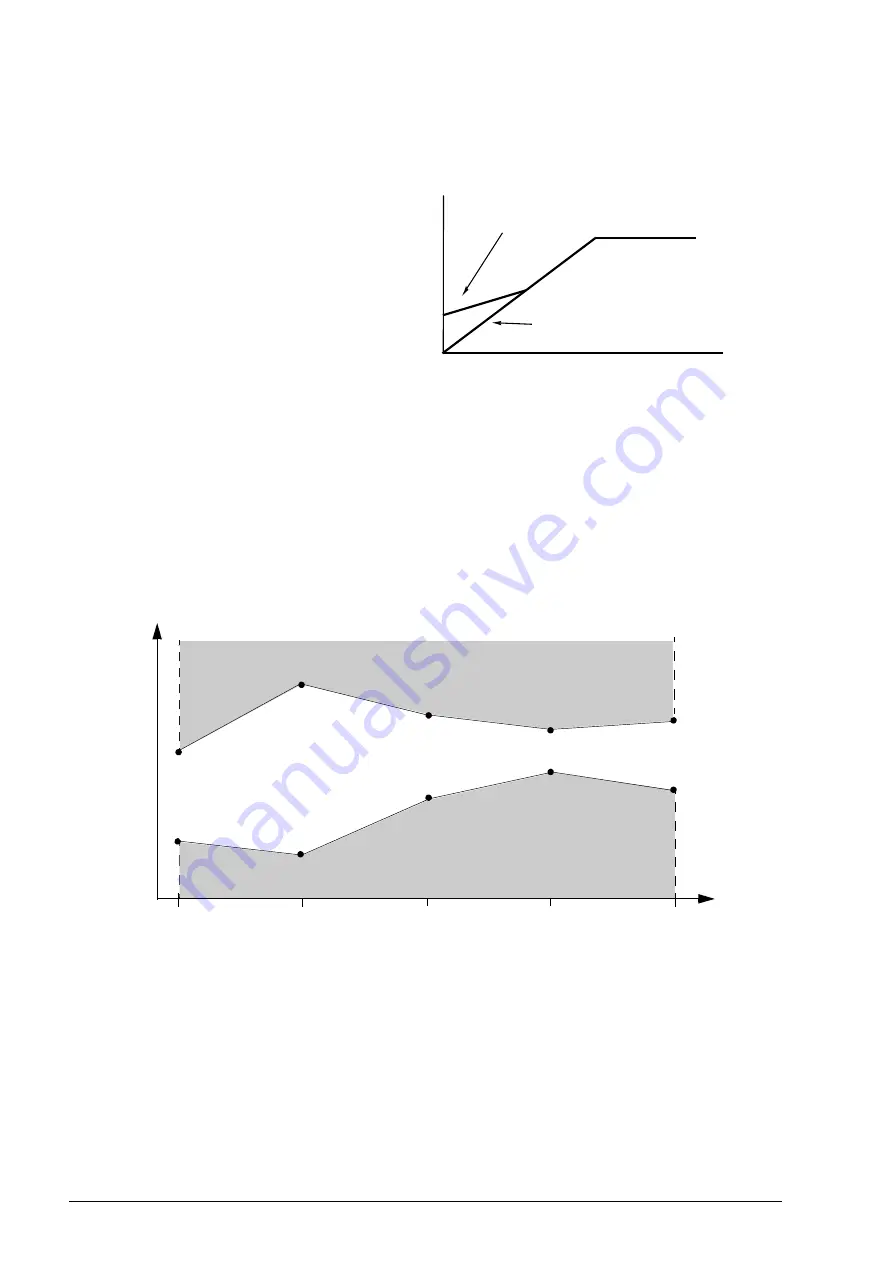
User-definable load curve
The drive output can be limited by defining a user-definable load curve. In practice,
the user load curve consists of an overload and an underload curve, even though
neither is compulsory. Each curve is formed by five points that represent output
current or torque as a function of frequency.
An alarm or fault can be set up to occur when the curve is exceeded. The upper
boundary (overload curve) can also be used as a torque or current limiter.
Settings
Parameter group
(page
f
(Hz)
Motor Voltage
No compensation
IR Compensation
f
(Hz)
Load
(%)
Par.
Par.
Par.
Par.
Par.
Allowed operating range
Overload area
Underload area
Содержание ACS850 series
Страница 1: ...ACS850 Firmware Manual ACS850 Standard Control Program ...
Страница 4: ......
Страница 56: ...56 Control locations and operating modes ...
Страница 262: ...262 Parameters ...
Страница 310: ...310 Fault tracing ...
Страница 348: ...348 Control through a fieldbus adapter ...
Страница 358: ...358 Drive to drive link ...
Страница 368: ...368 Control chain and drive logic diagrams ...







































































