
























Page34 INSTRUCTION MANUAL CENTRAL COMMAND STATIONS MX10, MX10EC
Menu points
BaseCab LOCO
BaseCab LOCO - screen
GREEN
This function is shown in parentheses on the MX10 and is
therefore not fully implemented. You can call up the screen
“BaseCab LOCO”, but
not
use it.
See chapter 8.4
Menu points
BaseCab OP PROG
BaseCab OP PROG- screen
GREEN
This function is shown in parentheses on the MX10 and is
therefore
not implemented
. You cannot call up the screen
“BaseCab OP PROG”. (Symbolic screen)
See chapter 8.5
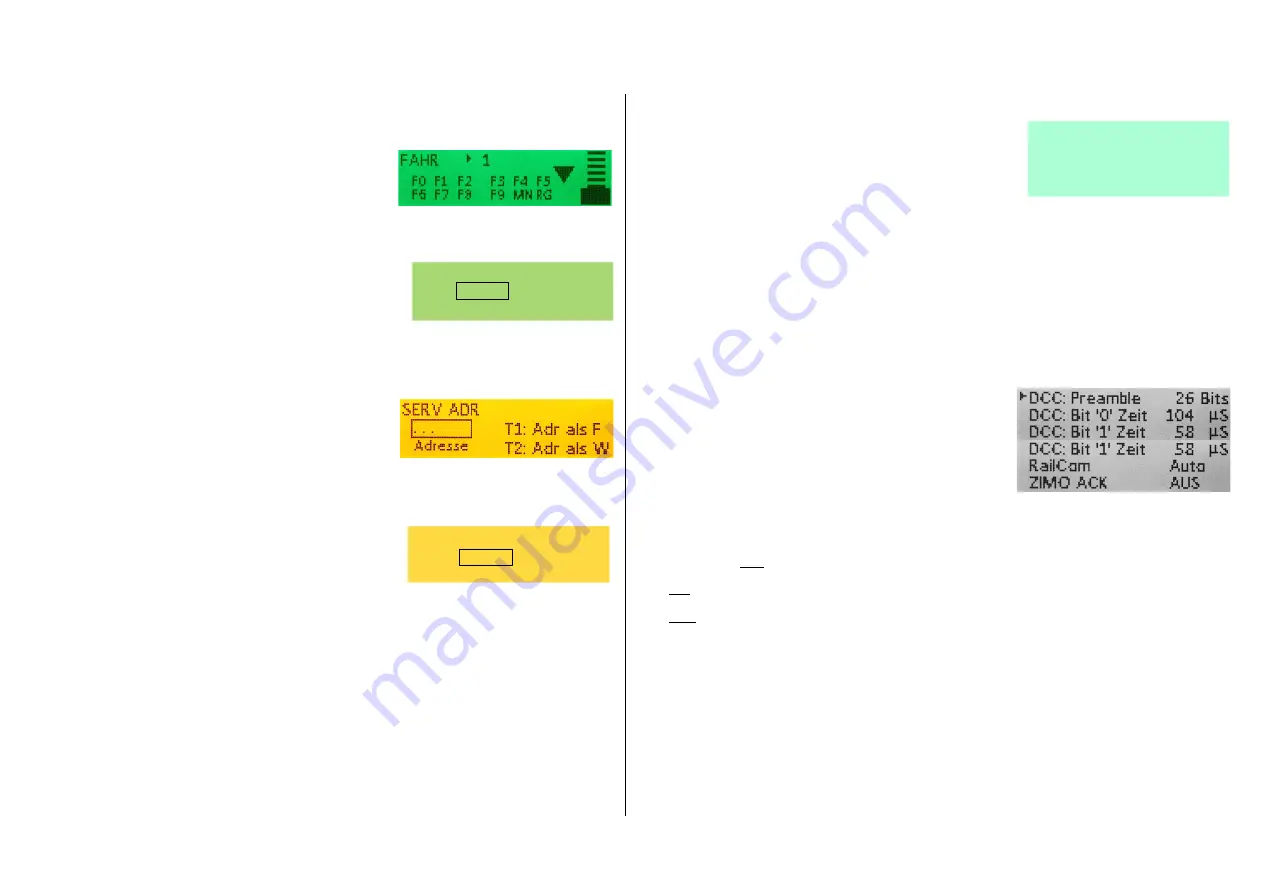
Menu points BaseCab SERV ADR
BaseCab SERV ADR– screen
YELLOW
This function is shown in parentheses on the MX10 and is
therefore not fully implemented. You can call up the screen
“BaseCab SERV ADR”, but
not
use it.
See chapter 8.6
Menu points BaseCab SERV PROG
BaseCab SERV PROG– screen
YELLOW
This function is shown in parentheses on the MX10 and is
therefore
not implemented
. You cannot call up the screen
“BaseCab SERV PROG”. (Symbolic screen)
See chapter 8.7
When using “BaseCab” on the MX10, you use the display and the operating elements (rotary knob,
three buttons) as “controller”: driving (i.e. controlling the speed and switch functions), addressing and
programming CVs in service mode or in operational mode (POM) can be done with the MX10, i.e.
without controller.
Menu point ZIMO Decoder SW&Soud-Update
listed from the file storage
TURQUOISE
This function is
not realised
yet.
The screen you can call up looks currently like this (one de-
coder firmware file and one ReadyToUse-sound-file):
After selecting an update or sound file, the
Update and Sound loading screen
YELLOW
is
called up (after its completion:
GREEN
.)
Calling up the decoder SW updates from the menu means that a SW update collection file or sound
project previously stored in the MX10’s “file storage” shall be used; the available files are listed. In con-
trast to the situation in which the updating procedure is started by inserting a flash drive to use a file di-
rectly from this drive.
See chapter 7
This chapter explains decoder software updates and sound loading
from the file storage as well as from the flash drive.
Menu points DCC signal configuration
Configuration screen
GREY
DCC Preamble: Adjustable number of Preamble bits; MX10
default is 26, this number must not be undercut in any
case if an MX9 is used. NMRA standard defines 14 bits,
ZIMO decoders also work with 10 preamble bits, whereby,
in this case, the smallest loss of data leads to problems.
Reducing the number of preamble bits allows a faster data
transmission, but is only recommended for experienced
users.
DCC Bit ‚0‘ / ‚1‘ time: This is where the times for DCC bits 0 and 1 are defined. This function is only
recommended for experienced users and is usually not necessary, because the default corresponds
to the standard.
DCC RailCom: Auto: RailCom is turned off automatically, if a MX9 is detected, otherwise RailCom is
always turned on. This is the default configuration of the MX10.
ON: Keeps RailCom turned on, no matter what devices are connected to the CAN bus. If MX9 are
used, this can lead to problems with driving decoders or other components, therefore select “OFF”!
OFF: RailCom is turned off. This configuration has to be set with terminal loop modules, especially if
they have a power surge relay, because otherwise, those would switch at every RailCom cut out
which would lead to damage.
ZIMO ACK: ZIMO ACKnowledgement is the MX10’s automatic loco number identification. At delivery it
is turned off. You can choose between “Ackn.” and “Search”. If you wish a notification in a program
on you computer or an address of a new vehicle shall be detected on the tracks.
OP PROG 1016
DCC
CV
. . .
Decoder SW&Sound:
DS140623.ZSU
US_DA_Coll.zpp
back
SERV ADR
CV
. . .







































































