Page16 INSTRUCTION MANUAL CENTRAL COMMAND STATIONS MX10, MX10EC
Connecting old and new ZIMO controllers and
controllers of other manufacturers
As controllers you can use various devices that communicate with the MX10 in different ways:
- ZIMO
CAN – “CAN1“ and “CAN2“
ZIMO controllers of all generations: MX2, MX21, MX31, MX32 and ZIMO controllers MXFU (to con-
nect the “old” radio controllers MX21FU, MX31FU). But only the current generation (MX32) uses all
functions of the MX10. But only the current generation (MX32) uses all functions of the MX10; see
notes below!
-
“Mi-Wi”
via the built-in radio module in the MX10
communicates with the current generation of ZIMO controllers (MX32FU and MX33FU), which also
have a built-in “Mi-Wi” radio module. “MiWi” is a radio module of the company Microchip, which is
based on the same hardware as the better-known “ZigBee” standard.
-
XNET
The “red” Roco Multimaus and Massoth DiMax Navigator communicate via “XPressNet”, the ZIMO-
called “XNET”. The actual XNET connectivity of the MX10 with products other than Roco and Mas-
soth are NOT tested.
-
WIFI
(MX10 connected to a router via the LAN socket)
for mobile phones and tables with WIFI, or apps on these devices (e.g. Roco Z21 App), and for oth-
er mobile devices (e.g. Roco WIFI Multimaus).
- Bus systems of other manufacturers:
LocoNet
and
S88
These interfaces are available on the hardware, but not (yet) working. The future implementation
depends on the demand.
-
USB client
interface:
Computer controllers within interlocking and decoder configuration software like STP, ESTWGJ,
Train Controller, PfuSch, etc. most of the time connect via USB or LAN (Ethernet).
-
Sniffer
input:
Here you can connect the track outputs of third-party systems to transmit the produced data to
MX10’s outputs. This interface is available on the hardware, but not (yet) working. The implementa-
tion depends on the demand.
The ZIMO CAN bus also called “CAN1” bus - on the sockets ZIMO CAN
The central command station MX10 has two 8-pole sockets for the CAN bus, one on the front and the
second one on the back of the device. The 6 pins in the middle of the two sockets which form the so-
called ZIMO CAN are completely identical, and internally connected in parallel. This means that all
devices connected to the CAN sockets are also electrically connected in parallel.
The difference between the two CAN sockets only refers to the outer pins: The socket on the back has
an additional wire to synchronise the control signals of the StEin modules; whereas the socket on the
front transforms to a sniffer input, in case an 8-pole cable is used.
Each controller (MX32, MX32FU, MX31, ...) is equipped with two equal 6-pole sockets, which allows
daisy-chaining power supply and data from one controller to the next. An alternative would be a 6-pole
ring feeder with sockets and distributors, to which controllers can be connected if needed.
RailCom
®
is a registered trademark of Lenz Elektronik GmbH
“CAN2” - bus
Additional to XNET itself, connections for “CAN2” are available in the
“XNET” socket.
This is needed
in case “new” products MX10, MX32 are used in combination with “old” controllers like MX31, or ac-
cessory and track section modules MX8, MX9.
In case MX32 or MX32FU
are
used in combination with “old” controllers MX31, MX2, MX21
or radio
modules MXFU
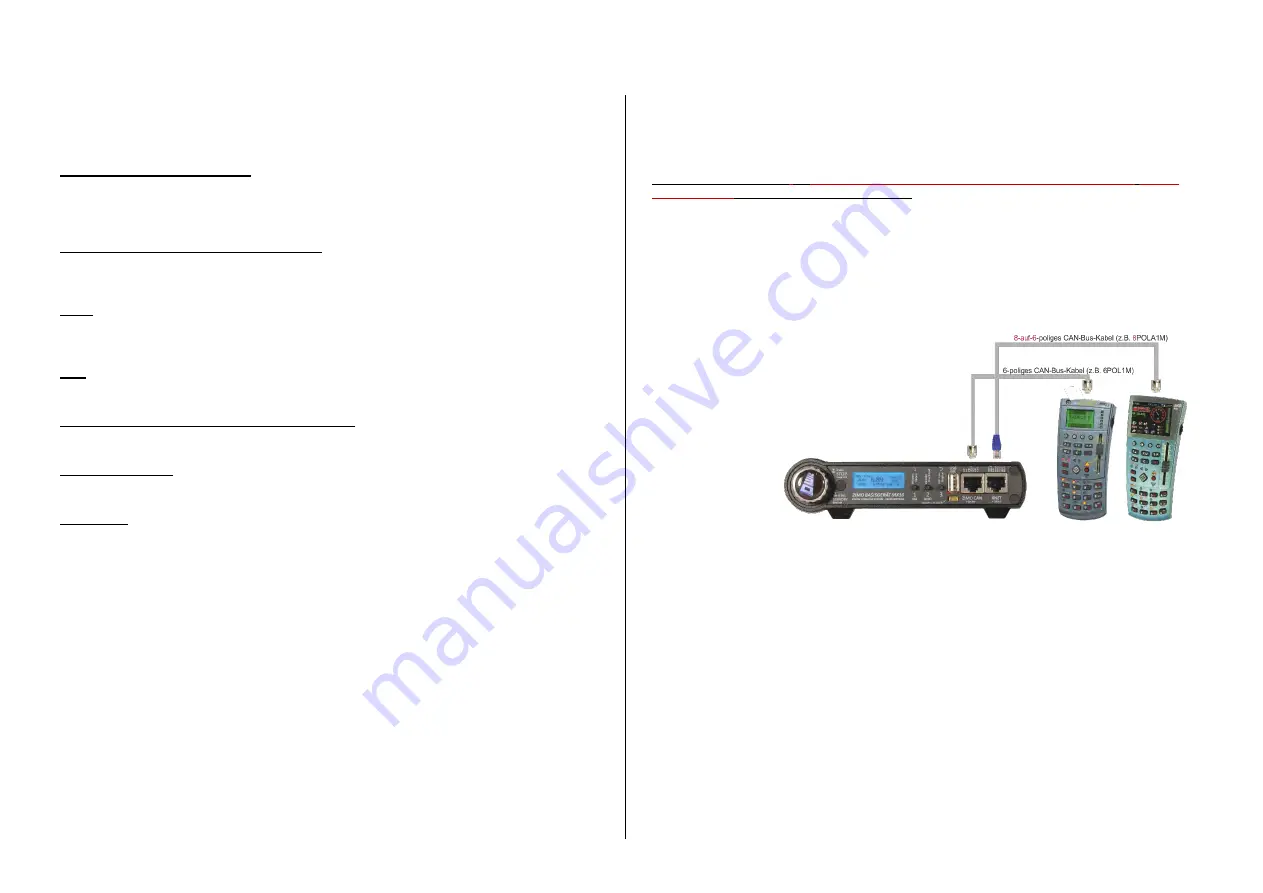
the wiring has to be the following:
- The “old” devices (MX31, ...) have to be connected to one of the two CAN sockets with a standard
CAN bus cable, either in the front or the back.
- The “new” devices (MX32, MX32FU) have to be connected to the XNET socket (!) with the
special
cable “8POLAxM”
(8-pole plug on the MX10’s side, 6-pole plug on the controller’s side). This special
cable connects the “CAN2” connections
of the XNET socket to the CAN connections of the controller.
It is necessary to use both CAN buses, because there is a new, faster protocol between the “new” MX32, MX32FU
and the MX10, which the “old” devices are not capable of. As soon as there is one device in the system circuit
that operates with the old CAN protocol, the MX10
switches to “MX1 operation”. This leads to limitations in
the ZIMO CAN circuit, Like for example no RailCom, 12
functions, ...
To retain all functions of the MX32, it has to
be connected to the ZIMO CAN2
(XNET) socket. There are no limitations in the
radio operation.
This wiring is also important, when working with
MX8 and/or MX9
. These modules are connected like
a MX31 to the “normal” ZIMO CAN, and the MX32 are connected to the “CAN2” on the XNET socket,
as described above.
Radio communication via “Mi-Wi”
The MX10 and the ZIMO controllers MX32FU are equipped with a radio module of the company Mi-
crochip, who also manufactured the “PIC” microcontrollers.
The “Mi-Wi” protocol is a derivative of the “ZigBee” standard, and therefore 2.4 GHz, but with higher
efficiency and lower resource consumption. Compared to bluetooth, which also has 2.4 GHz, Mi-Wi
has a bigger range of up to several 100m. In contrast to WIFI, Mi-Wi has an integrated “Mesh” net-
workability.
Compared to the 344 MHz technology of the “old” ZIMO controllers, Mi-Wi has a higher throughput
and worldwide approval.
Potential downsides of the 2.4 GHz technology compared to the 344 MHz concerning the penetration
ability inside buildings can be balanced on the one hand by the networkability, and on the other hand,
900 MHz Mi-Wi modules can be used (instead of 2.4 GHz) if needed.