




























8 Operation
8.9.2 External Torque Limit (Output Torque Limiting by Input Signals)
8-70
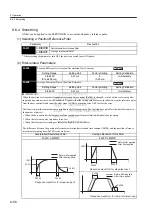
(3) Changes in Output Torque during External Torque Limiting
Example: External torque limit (Pn402, Pn403) set to 800%
Note: In this example, the servomotor rotation direction is Pn000 = n.
0 (standard setting, CCW =
forward).
/P-CL (Forward External Torque Limit Input)
High level
Low level
/N-CL
(Reverse
External
Torque Limit
Input)
High
level
Low
level
Pn403
Pn402
0
Torque
Speed
Pn403
0
Pn404
Pn402
Torque
Speed
0
Pn403
Pn405
Pn402
Torque
Speed
0
Pn403
Pn405
Pn404
Pn402
Torque
Speed
Summary of Contents for SGDJ Series
Page 19: ...xix INDEX Revision History ...
Page 34: ...2 Selections 2 8 2 4 Selecting Cables CN4 c d e FG ...
Page 176: ...8 3 8 ...







































































