













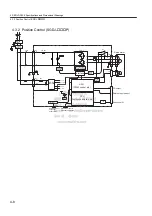











4 SERVOPACK Specifications and Dimensional Drawings
4.1.2 SERVOPACK Ratings and Specifications 2
4-4
* 1. Use the SERVOPACK within the ambient temperature range. When enclosed in a control panel, internal tem-
peratures must not exceed the ambient temperature range.
* 2. Speed regulation is defined as follows:
The motor speed may change due to voltage variations or amplifier drift and changes in processing resistance
due to temperature variation. The ratio of speed changes to the rated speed represent speed regulation due to
voltage and temperature variations.
* 3. Forward is clockwise viewed from the non-load side of the servomotor. (Counterclockwise viewed from the
load and shaft end)
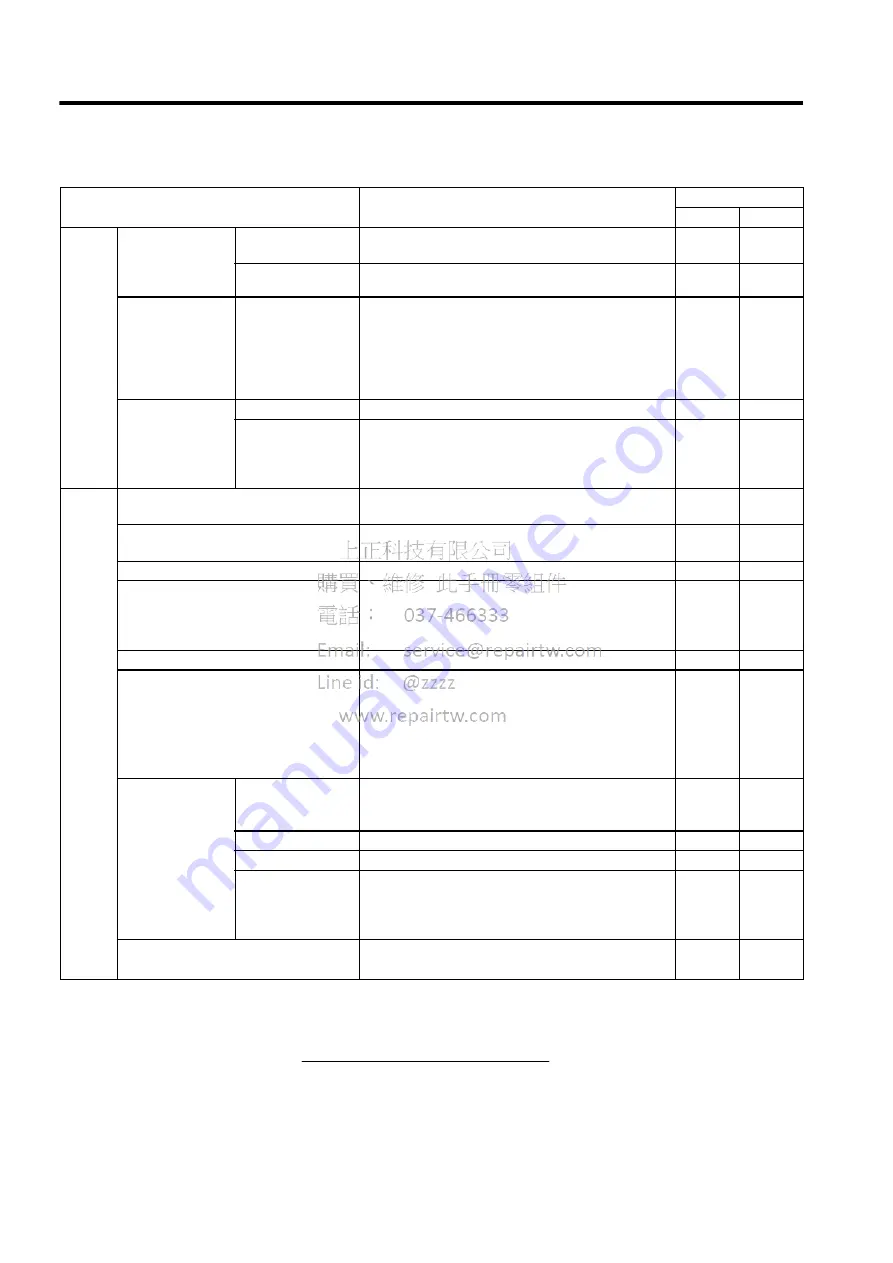
I/O
Signals
Position Output
Form
Phase-A, -B, -C line driver
Phase-S line driver (only with an absolute encoder)
Applicable Applicable
Frequency Dividing
Ratio
Any
Applicable Applicable
Sequence Input
Signal allocation can
be modified.
Servo ON, P control (or Control mode switching, for-
ward/reverse motor rotation by internal speed setting,
zero clamping, reference pulse prohibited), forward run
prohibited (P-OT), reverse run prohibited (N-OT), alarm
reset, forward current limit, and reverse current limit (or
internal speed selection)
Applicable Applicable
Sequence Output
Fixed Output
Servo alarm, 3-bit alarm codes
Applicable Applicable
Signal allocation can
be modified.
Positioning completed (speed coincidence), during ser-
vomotor rotation, servo ready, during current limiting,
during speed limiting, brake released, warning, selecting
three of the NEAR signals.
Applicable Applicable
Internal
Func-
tions
Dynamic Brake
Operated at main power OFF, servo alarm, servo OFF or
overtravel.
Applicable Applicable
Overtravel Stop
Dynamic brake stop at P-OT or N-OT, deceleration to a
stop, or coast to a stop
Applicable Applicable
Electronic Gear
0.01
≤
B/A
≤
100
N/A
Applicable
Protection
Overcurrent, overvoltage, overload, regeneration error,
main circuit detection section error, heat sink over-
heated, no power supply, overflow, overspeed, encoder
error, overrun, CPU error, parameter error.
Applicable Applicable
LED Display
Charge, Power
Applicable Applicable
CN5 Analog Monitoring
Analog monitor connector built in for monitoring speed,
torque and other reference signals.
Speed: 1 V/1000 min
-1
Torque: 1 V/100% of rated torque
Position error pulses: 0.05 V/1 reference units or 0.05 V/
100 reference units
Applicable Applicable
Communications
Connected Devices
Digital Operator (hand-held model), RS-422A port such
as for a personal computer (RS-232C ports under certain
conditions)
Applicable Applicable
1:N Communications
Up to N = 14 for RS-422A ports
Applicable Applicable
Axis Address Setting
Set with parameters.
Applicable Applicable
Functions
Status display, parameter setting, monitor display, alarm
trace-back display, JOG and autotuning operations,
speed, torque reference signal and other drawing func-
tions.
Applicable Applicable
Others
Reverse rotation connection, zero-point search, auto-
matic servomotor ID.
Applicable Applicable
(cont’d)
Item
Ratings and Specifications
SGDJ-
S
P
Speed reguration
=
No-load motor speed – Total load motor speed
Rated motor speed
×
100
%
Summary of Contents for SGDJ Series
Page 19: ...xix INDEX Revision History ...
Page 34: ...2 Selections 2 8 2 4 Selecting Cables CN4 c d e FG ...
Page 176: ...8 3 8 ...







































































