





















3 Specifications and Dimensional Drawings
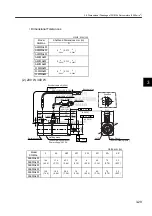
3.6.4 SGMAJ Servomotors (3000 min
-1
) With Standard Backlash Gears and Brakes
3-38
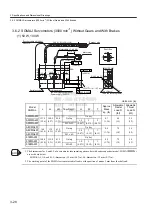
1. The dimensions for L and LL of a servomotor incorporating an encoder with super-capacitor (model: SGMAJ-
4)
are as shown below.
SGMAJ-02 and 03: L-dim 8.2 mm (0.32 in), LL-dim8.2 mm (0.32 in)
2. The working point of the SGMAJ servomotor radial load is at the position of minus 5 mm from the shaft end.
• Dimensional Tolerances
Units: mm (in)
Model
SGMAJ-
Gear
Ratio
LC
LA
LZ
Tap
×
Depth
∗
U
W
T
Approx.
Mass
kg (lb)
Allowable
Radial
Load
N (lbf)
Allowable
Thrust
Load
N (lbf)
02E
AJ1
1/5
90
(3.54)
105
(4.13)
9
(0.35)
M5
×
10L
3.5
(0.14)
6
(0.24)
6
(0.24)
3.3
(7.3)
275
(62)
235
(53)
02E
AJ3
3/31
90
(3.54)
105
(4.13)
9
(0.35)
M5
×
10L
3.5
(0.14)
6
(0.24)
6
(0.24)
3.3
(7.3)
360
(82)
02E
AJC
1/21
105
(4.13)
120
(4.72)
9
(0.35)
M6
×
12L
4
(0.16)
8
(0.31)
7
(0.28)
4.7
(10.4)
585
(132)
290
(66)
02E
AJ7
1/33
105
(4.13)
120
(4.72)
9
(0.35)
M6
×
12L
4
(0.16)
8
(0.31)
7
(0.28)
4.7
(10.4)
635
(133)
03E
AJ1
1/5
90
(3.54)
105
(4.13)
9
(0.35)
M5
×
10L
3.5
(0.14)
6
(0.24)
6
(0.24)
3.9
(8.6)
275
(62)
235
(53)
03E
AJ3
3/31
105
(4.13)
120
(4.72)
9
(0.35)
M6
×
12L
4
(0.16)
8
(0.31)
7
(0.28)
4.8
(10.6)
460
(104)
290
(66)
03E
AJC
1/21
120
(4.72)
135
(5.31)
11
(0.43)
M8
×
16L
5
(0.20)
10
(0.39)
8
(0.31)
6.9
(15.2)
655
(149)
310
(70)
03E
AJ7
1/33
120
(4.72)
135
(5.31)
11
(0.43)
M8
×
16L
5
(0.20)
10
(0.39)
8
(0.31)
6.9
(15.2)
755
(171)
INFO
Units: mm (in)
Model
SGMAJ-
Flange Face Dimensions
Shaft-end Dimensions
LB
S
02E
AJ1
02E
AJ3
02E
AJC
02E
AJ7
03E
AJ1
03E
AJ3
03E
AJC
03E
AJ7
85
0
0.035
–
3.35
0
0.0014
–
20
0
0.021
–
0.79
0
0.0008
–
85
0
0.035
–
3.35
0
0.0014
–
20
0
0.021
–
0.79
0
0.0008
–
100
0
0.035
–
3.94
0
0.0014
–
25
0
0.021
–
0.98
0
0.0008
–
100
0
0.035
–
3.94
0
0.0014
–
25
0
0.021
–
0.98
0
0.0008
–
85
0
0.035
–
3.35
0
0.0014
–
20
0
0.021
–
0.79
0
0.0008
–
100
0
0.035
–
3.94
0
0.0014
–
25
0
0.021
–
0.98
0
0.0008
–
115
0
0.035
–
4.53
0
0.0014
–
32
0
0.025
–
1.26
0
0.0010
–
115
0
0.035
–
4.53
0
0.0014
–
32
0
0.025
–
1.26
0
0.0010
–
Summary of Contents for SGDJ Series
Page 19: ...xix INDEX Revision History ...
Page 34: ...2 Selections 2 8 2 4 Selecting Cables CN4 c d e FG ...
Page 176: ...8 3 8 ...