





























4 Operation
4.2.6 Encoder Output Pulse Setting
4-14
4.2.6
Encoder Output Pulse Setting
Set the encoder output pulse using the following parameter.
Set the encoder output pulse for encoder output pulse signals (PAO, /PAO, PBO, /PBO) externally from the
SERVOPACK.
Feedback pulses per linear scale pitch (Pn282) are divided inside the SERVOPACK by the value set in Pn281
before being output. Set according to the system specifications of the machine or host controller.
The setting range varies with the linear servomotor maximum speed (Pn385) and linear scale pitch (Pn282).
The upper limit value for Pn281 can be obtained by the following equation.
Upper limit value for Pn281 =
×
72
Note 1. When the scale pitch is 4
μ
m, the motor maximum speed is limited to 1 ms/s because of the maximum response
frequency of serial converter unit.
2. If the set value is out of the setting range or does not satisfy the setting conditions, the alarm "Encoder Output
Pulse Setting Error" (A.041) is output.
If the motor speed exceeds the upper limit value according to the set encoder output resolution, the alarm "Over-
speed of Encoder Output Pulse Rate" (A.511) is output.
3. The upper limit of encoder output resolution is limited by the frequency dividing specification of serial converter
unit.
4. When an absolute linear scale made by Mitutoyo Corporation is used, the linear scale pitch becomes the value
which is obtained by
"
resolution (
μ
m/pulse)
×
512.
"
(The set value in Pn282 becomes invalid.)
Setting Example
When the linear scale pitch = 20
μ
m (Pn282 = 20.00) and the motor maximum speed = 5 m/s (Pn385 = 50),
Pn281 = 28 is accepted, but Pn281 = 29 is not accepted and A.041 is output.
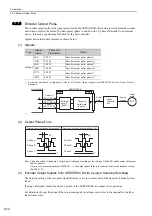
Output Example
When Pn281 = 20 (20-edge output (5-pulse output) per linear scale pitch),
Pn281
Encoder Output Resolution
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
1 to 4096
1 edge/pitch
20
After restart
Setup
Speed
Position
Force
Pn282
Pn385
Preset value
㧦
20
Linear scale
pitch (Pn282)
PAO
PBO







































































