





























11.1 List of Parameters
11.1.2 List of Parameters
11-8
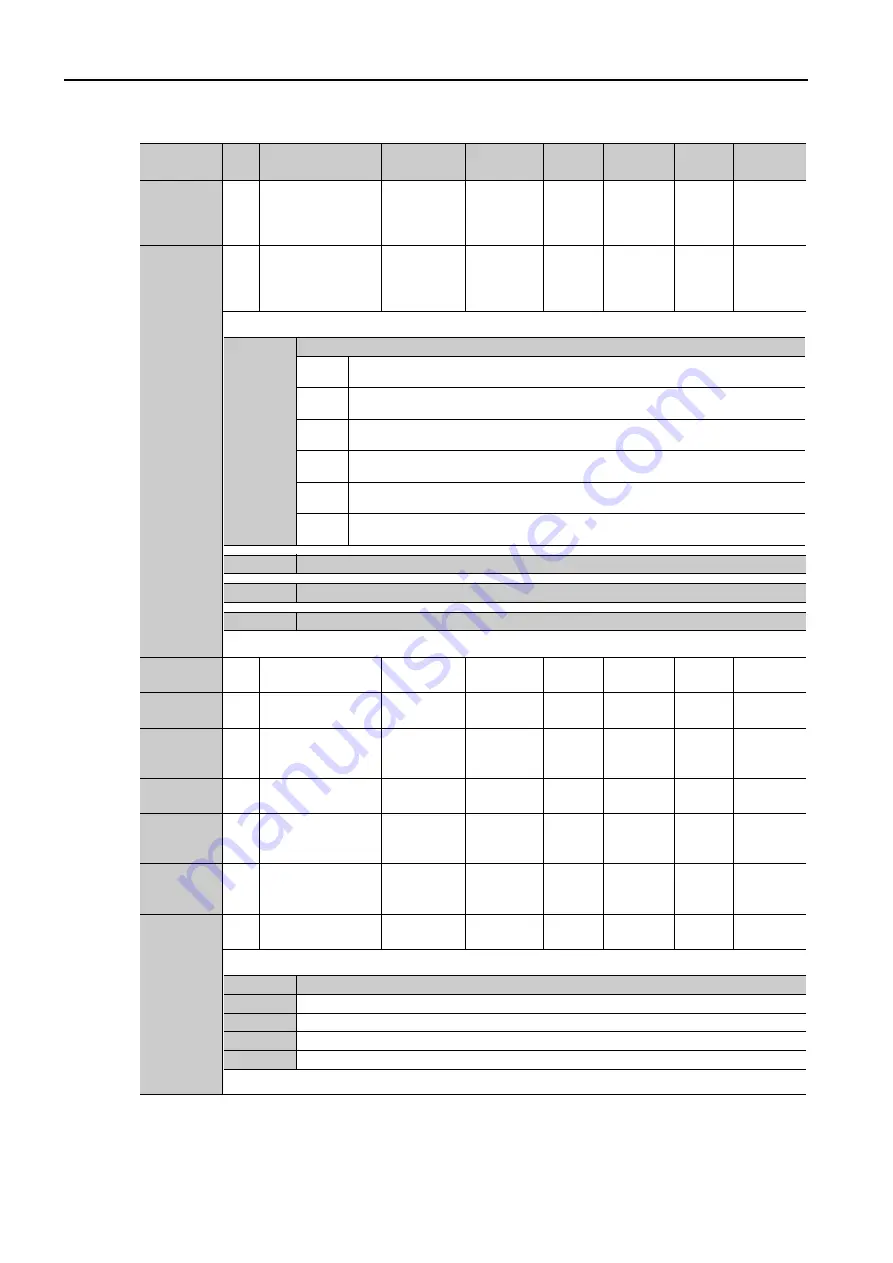
Pn52C
2
Base Current
Derating at Motor
Overload
Detection
10 to 100
1%
100
After
restart
Setup
Pn530
2
Program
Jog Operation-
Related Selec-
tions
0000h to
0005h
−
0000h
Immedi-
ately
Setup
Pn531
4
Program Jog
Travel Distance
1 to
134,217,728
1 refer-
ence unit
1024
Immedi-
ately
Setup
Pn533
2
Program Jog
Movement Speed
1 to 10,000
1 min
-1
500
Immedi-
ately
Setup
Pn534
2
Program Jog
Acceleration/
Deceleration Time
2 to 10,000
1 ms
100
Immedi-
ately
Setup
Pn535
2
Program Jog
Waiting Time
0 to 10,000
1 ms
100
Immedi-
ately
Setup
Pn536
2
Program Jog
Number of
Movements
0 to 1,000
Times
1
Immedi-
ately
Setup
Pn560
2
Residual
Vibration
Detection Width
1 to 3,000
0.1%
400
Immedi-
ately
Setup
PnB20
2
Movement
Method
0 to 3
−
0
After
restart
−
Continued on next page.
Continued from previous page.
Parameter
No.
Size
Name
Setting
Range
Setting
Unit
Default
Setting
When
Enabled
Classi-
fication
Reference
n.
X
Program Jog Operation Pattern
0
(Waiting time in Pn535
→
Forward by travel distance in Pn531)
×
Number of move-
ments in Pn536
1
(Waiting time in Pn535
→
Reverse by travel distance in Pn531)
×
Number of move-
ments in Pn536
2
(Waiting time in Pn535
→
Forward by travel distance in Pn531) × Number of move-
ments in Pn536
3
(Waiting time in Pn535
→
Reverse by travel distance in Pn531) × Number of move-
ments in Pn536
4
(Waiting time in Pn535
→
Forward by travel distance in Pn531
→
Waiting time in
Pn535
→
Reserve by travel distance in Pn531)
×
Number of movements in Pn536
5
(Waiting time in Pn535
→
Reverse by travel distance in Pn531
→
Waiting time in
Pn535
→
Forward by travel distance in Pn531)
×
Number of movements in Pn536
n.
X
Reserved parameter (Do not change.)
n.
X
Reserved parameter (Do not change.)
n.X
Reserved parameter (Do not change.)
Setting
Description
0
Use linear coordinates.
1
Use rotational coordinates. Use the shortest path.
2
Use rotational coordinates. Always move forward.
3
Use rotational coordinates. Always move in reverse.







































































