





























STAC6 Drives and Microstepping Motors:
User Manual
(Discontinued Product)
• 3.6 •
3:
C O N F I G U R A T I O N
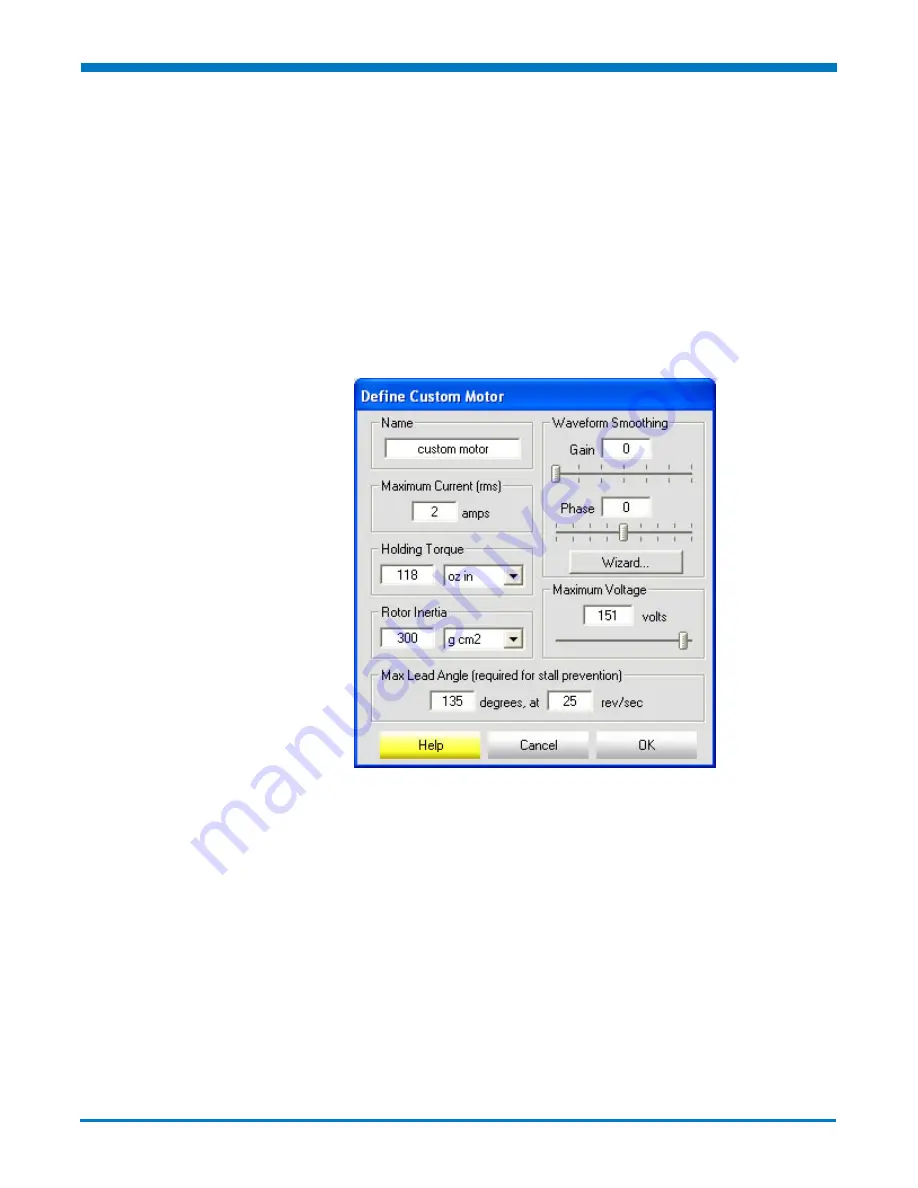
Referencing the motor manufacturer specifications, choose the
"custom motor" option and click on the Define Custom Motor
button. Enter the current, torque and inertia values into the Add
New Motor dialog. Enter the harmonic distortion gain and phase to
create the smoothest motion. Experiment by running the motor at a
slow speed (typically 1 rev/sec) with different gain and phase values
to see what works best. When in doubt, set the gain and phase at
0.
Figure 3.3: Add New Motor Dialog
If using the Encoder Stall Prevention feature (see the Encoder
Dialog), enter the maximum lead angle and the speed at which the
"timing advance" peaks so the STAC6 knows when it is producing
maximum torque. A typical motor produces maximum torque at low
speeds with a 90° lead angle. To produce maximum torque at
higher speeds, the lead angle must be increased because of
inductance and back emf. Above a certain speed, further increases
in lead angle produce no benefit, and the STAC6 must be told when
to stop advancing the timing. In the example below, the lead angle
is increased steadily from 90° at low speeds to 135° at 40 rev/sec,