





























Basics
3.18 Motion control and limits for dynamics
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
71
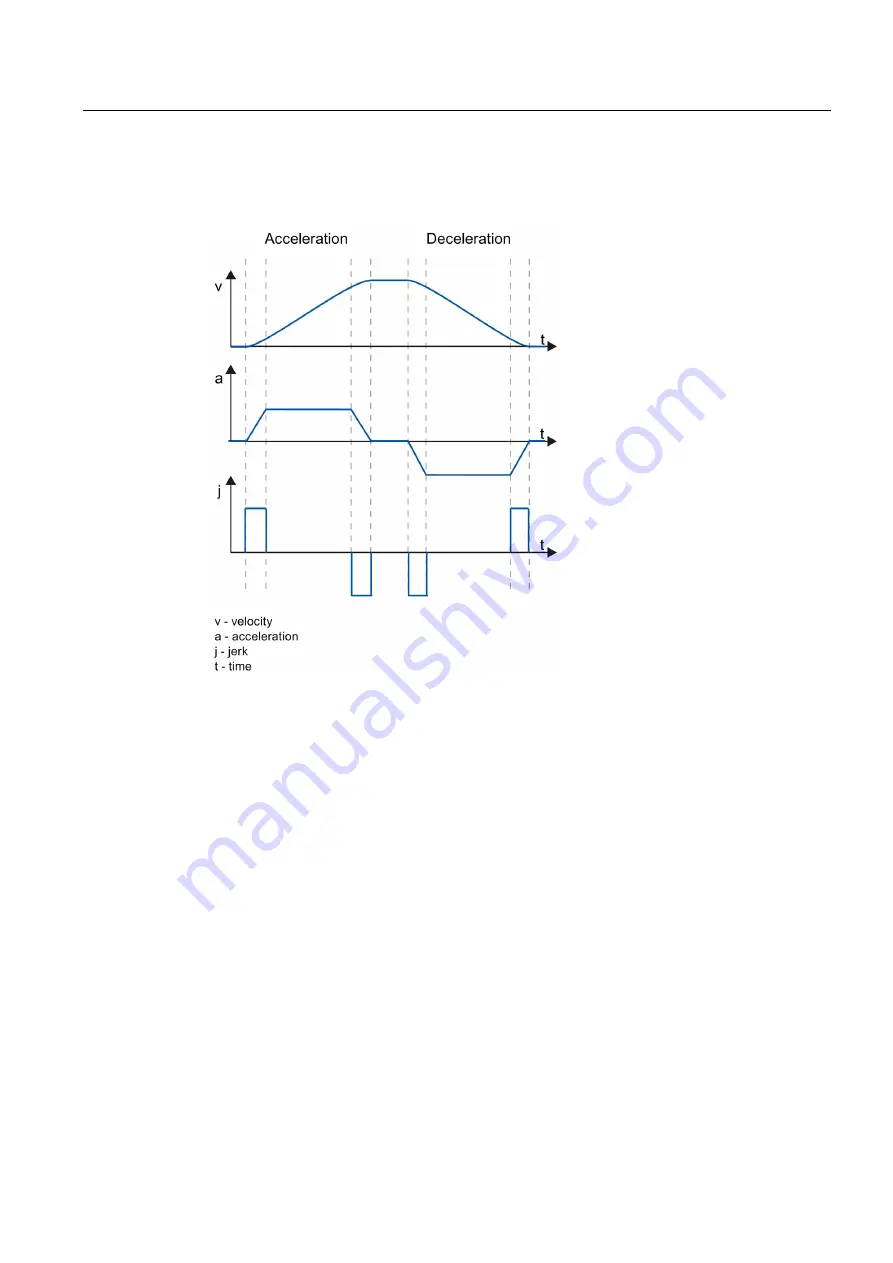
Velocity profile with jerk limit
The following figure shows velocity, acceleration and jerk:
A velocity profile with jerk limit is employed for a continuous acceleration and deceleration
sequence. The jerk can be specified.
3.18.3
Emergency stop deceleration
When stopping with the emergency stop ramp, the axis is braked to a standstill without a jerk
limit, using the configured emergency stop deceleration.
In the following cases the configured emergency stop deceleration is in effect:
●
For an emergency stop ramp that has been enabled via the Motion Control instruction
"MC_Power" with parameter "StopMode" = 0.
●
For a technology alarm with the local alarm response "Stop with emergency stop ramp".
This emergency stop deceleration can be set greater than the maximum deceleration. If the
emergency stop deceleration is set lower than this, it may occur that the axis does not stop
until after the limit switch in the case of "Stop at software limit switch" and the occurrence of
a technology alarm with the local alarm response "Stop with emergency stop ramp".