





























PowerFlex Digital DC Drive User Manual -
Publication 20P-UM001C-EN-P - July 2008
3-20
Programming and Parameters
MO
T
O
R C
O
NTR
O
L
Spee
d Feedb
ac
k
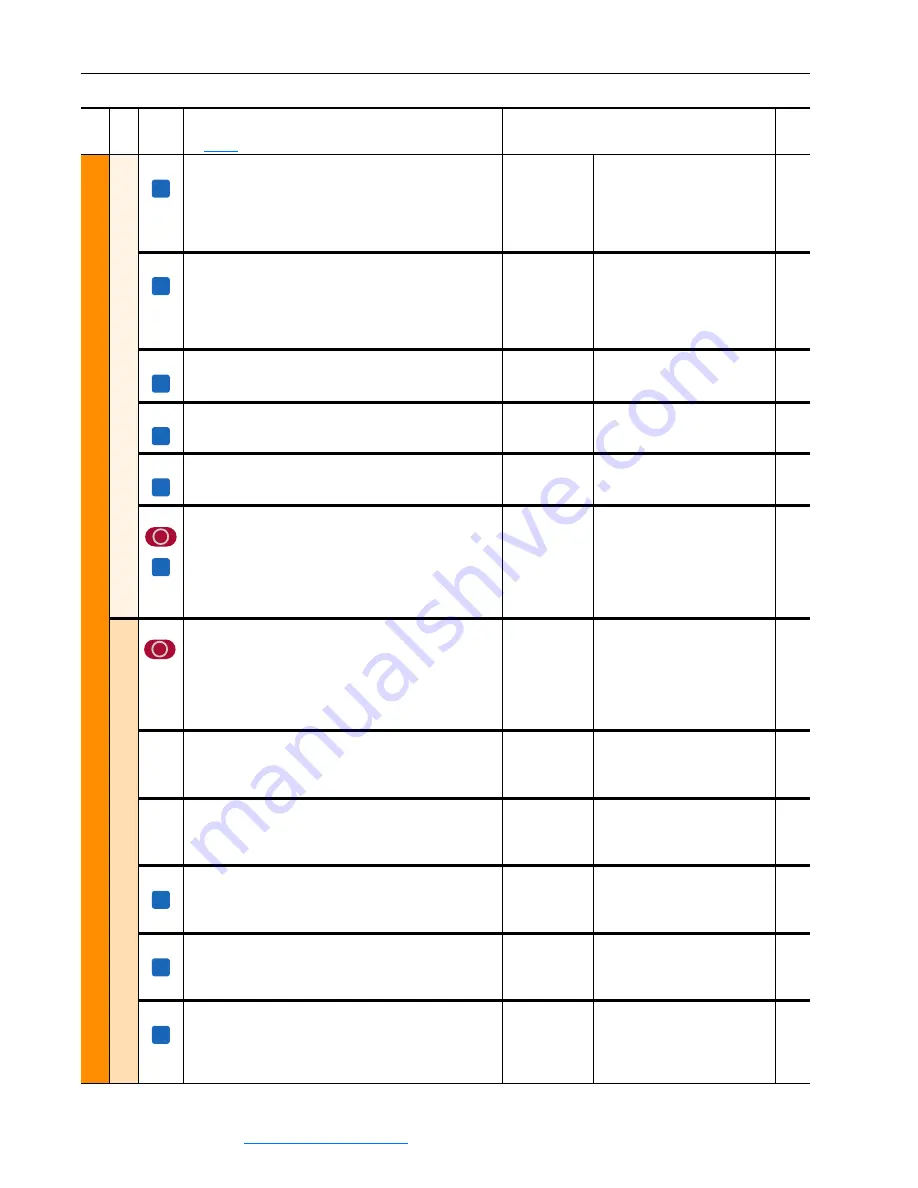
652
[Encoder Err Chk]
Enables/Disables monitoring of the digital encoder connection
status. When an alarm is detected, the HIM displays the
“Encoder Loss” (F91) fault. This parameter can be programmed
on a digital output. This function is activated by setting Par 457
[Spd Fdbk Control] = “Enabled”.
Default:
Options:
0
0 =
1 =
“Disabled”
“Disabled”
“Enabled”
457
911
[Z Channel Enable]
Determines whether the encoder zero pulse (qualification signal
or “zero cam”) will be read by the drive. This parameter is used
for systems implementing position control.
•
“Enabled” = The encoder zero pulse is read.
•
“Disabled” = The encoder zero pulse is not read.
Default:
Options:
0 =
0 =
1 =
“Disabled”
“Disabled”
“Enabled”
912
[Z Capture Pos En]
Control register of the zero pulse and of the encoder
qualification signal.
Default:
Min/Max:
0
0 / 6553
913
[Z Captured Pos]
Data and function status register.
Default:
Min/Max:
Read Only
0 / 2
32
–1
923
[Act Spd Filter]
First order low pass filter time constant for Par 121 [Spd
Feedback Pct].
Default:
Min/Max:
Units:
0.100
0.001 / 1.000
s
121
1021
[Encoder Out Sel]
Defines the speed reference to which the encoder signal can be
input. This parameter is typically set to 0 "Off" and the encoder
is used for speed feedback only. When set to other than 0 "Off",
the choice of the speed reference destination must be made
according to the configuration of the speed regulator (for
example "Speed Ref A" cannot be used with an active ramp).
Default:
Options:
0 =
0 =
1 =
2 =
3 =
4 =
“Off”
“Off”
“Trim Ramp”
“Trim Speed”
“Speed Ref A”
“Speed Ref B”
A
u
to
tu
n
e
452
[CurrReg Autotune]
Setting this parameter to 1 “On” and pressing Enter on the HIM
keypad initiates the current regulator auto tuning procedure.
When the auto tuning procedure is complete, this parameter
automatically resets to 0 “Off”. The resulting armature
resistance and inductance values are set in parameters 453
[Arm Resistance] and 454 [Arm Inductance], respectively.
Default:
Options:
0 =
0 =
1 =
“Off”
“Off”
“On”
453
[Arm Resistance]
Motor armature resistance. This parameter can be manually
changed to a value other than the value obtained when the
current regulator auto tuning is completed.
Default:
Min/Max:
Units:
0.50
Based on drive current rating
Ohm
452
454
[Arm Inductance]
Motor armature inductance. This parameter can be manually
changed to a value other than the value obtained when the
current regulator auto tuning is completed.
Default:
Min/Max:
Units:
4.00
Based on drive current rating
mH
452
587
[I Reg Error]
The auxiliary signal used to determine whether the current
regulator is correctly tuned. The value should be as near to zero
as possible, but values between -/+40 are acceptable.
Default:
Min/Max:
Units:
Read Only
–/+80
V
452
1012
[Inertia C Filter]
First order low–pass filter used to reduce noise caused by the
speed differentiation process in the Inertia/Loss compensation
block.
Default:
Min/Max:
Units:
0
0 / 1000
ms
1013
[Torque Const]
The Motor torque constant used to calculate inertia and friction
compensation. The value in this parameter is automatically
adapted in the field weakening mode. This value is determined
during speed auto tuning.
Default:
Min/Max:
Units:
Based on drive current rating
0.01 / 99.99
N–m/A
File
Gr
oup
No.
Parameter Name & Description
See
page 3-2
for symbol descriptions
Values
Related
A
A
A
A
A
A
A
A
A







































































