




























PL
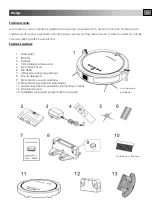
Możliwe jest ładowanie baterii za pośrednictwem stacji dokującej, patrz rysunek powyżej.
Krok 1: Włącznik zasilania wirtualnej ściany musi znajdować się w pozycji “ON”.
Krok 2: Naciśnij i przesuń przełącznik wtyczki zasilania w stacji dokującej.
Krok 3: Podłącz wtyczkę zasilającą do gniazda zasilającego w wirtualnej ścianie, dioda LED
w wirtualnej ścianie zacznie migać.
Krok 4: Gdy bateria wirtualnej ściany jest w pełni naładowana dioda LED świeci stale.
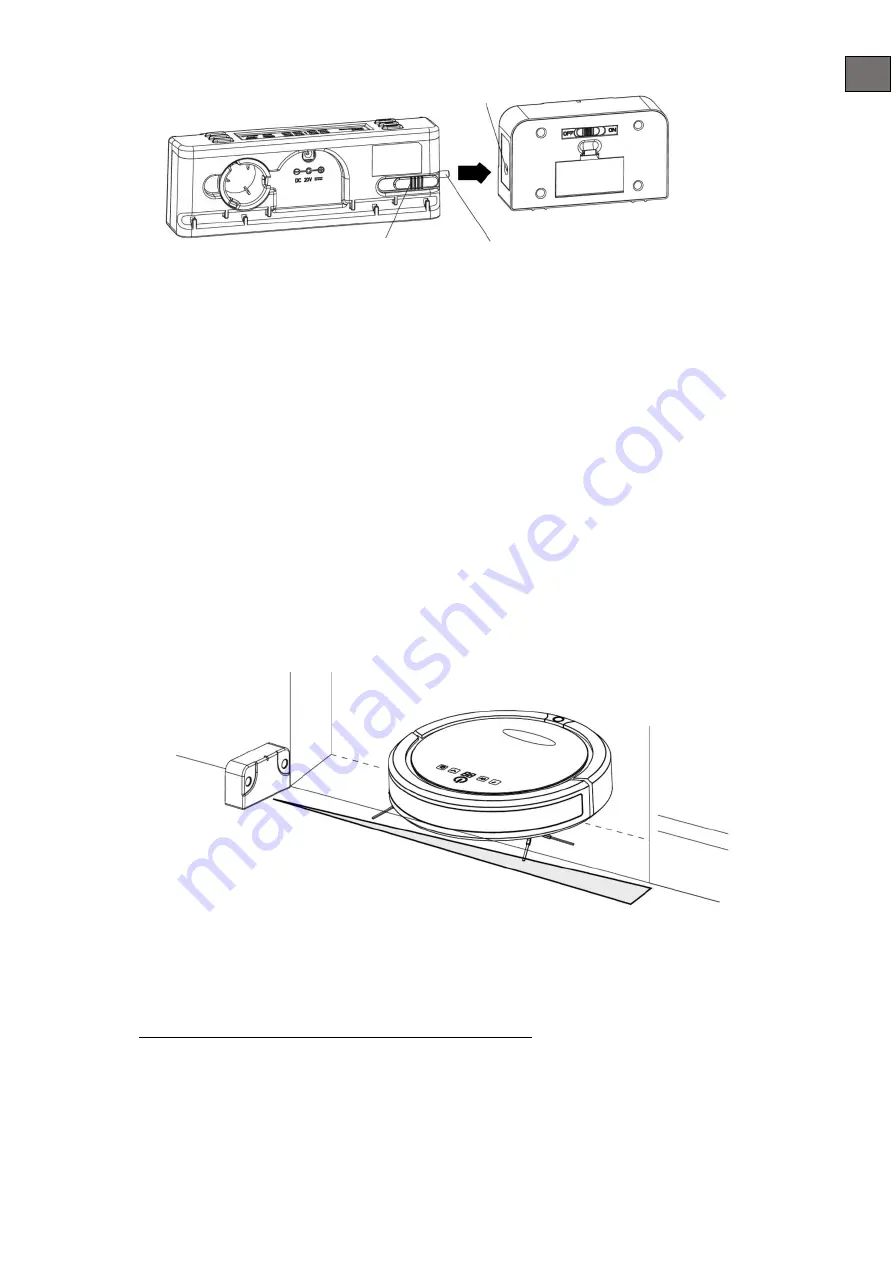
W trakcie pracy robota wirtualna ściana musi znajdować się w odległości co najmniej 3
metrów od podstawy ładowania. Należy unikać kierowania sygnału wirtualnej ściany w stronę
stacji dokującej.
Po zakończeniu cyklu sprzątania przez robota należy wyłączyć wirtualną ścianę przesuwając
przełącznik zasilania w pozycję “OFF”.
Robot w momencie wykrycia bariery ustanowionej przez wirtualną ścianę
zmieni kierunek poruszania się.
Parowanie Robota z ultradźwiękową wirtualną ścianą:
1.
włącz urządzenie /robot powinien być odsunięty stacji dokującej/,
2.
włącz wirtualną ścianę,
3.
dotknij i przytrzymaj przycisk lamy UV aż robot wyda dwukrotnie sygnał dźwiękowy,
4.
wąskim przedmiotem wciśnij i przytrzymaj przycisk znajdujący się z tyłu wirtualnej ściany do
momentu aż robot wyda sygnał dźwiękowy.
Stacja dokująca
Wirtualna ściana
Gniazdo zasilania
Wtyczka zasilania
Przełącznik
Stacja dokująca
Wirtualna ściana
Gniazdo zasilania
Wtyczka zasilania
Summary of Contents for Air AH-157
Page 5: ...EN TOP BOTTOM Features ...
Page 27: ...EN Useful Tips ...
Page 28: ...EN ...
Page 63: ......
Page 64: ...RoboJet www robojet tech ...







































































