























RHINO MOTION CONTROLS
RMCS-1120
Hybrid Servo Driver with Modbus RTU communication
(Max. 50Vdc and 7A per phase)
http://www.rhinomc.com
Page 9
Hybrid AC Driver [RMCS-1120]
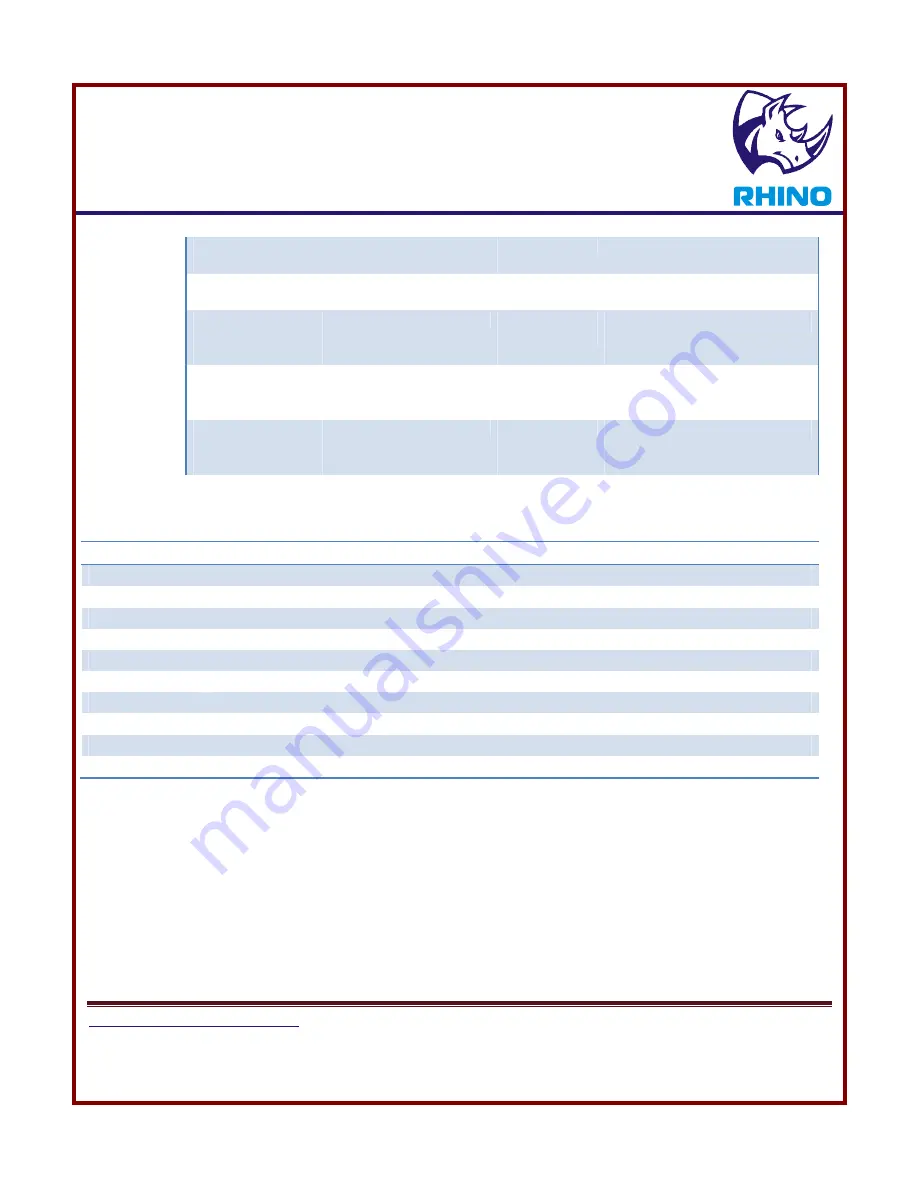
(CPR)
C_Speed
Current Speed
0X2009
8201
signed
-
-
C_Current
Current Input
Current
0X200A
8202
signed
-
-
C_Calibrate
Current loop
calibrated level
0X200B
8203
signed
-
-
C_Error
Realtime error
status
0X200C
8204
Signed
0
Where,
V_COMD
The maximum Velocity setting for Trapezoidal Motion Profile (15rpm / unit)
A_COMD
The Acceleration Slope setting for Trapezoidal Motion Profile (30rpm/s2 / unit)
M_COMD
The Displacement required for the Motion Profile in Encoder Steps (32bit signed)
M_STATE
The state of the Motion Profile State Machine
P_ERROR
The Position Error between Commanded and Current Position (Realtime)
C_POS
The Current Encoder Position (16 bit) (Realtime)
C_Angle
The Commutation Angle of the Shaft (Encoder CPR) (Realtime)
C_Speed
The Speed of the Motor (30rpm/step) (Realtime)
C_Current
The Current Command Given to Current Loop (Realtime)
C_Calibrate
The Startup Current Loop Calibration Value
C_Error
Gives the status of the error when motor is automatically disabled due to fault
Note:
The motion command value 4000 corresponds to one full rotation of motor. The programmer can
have multiples of 4000 to achieve specific number of rotations. For example, if 8 rotations are required,
this value would be 32000 (4000 multiplied by 8). If the motion command value is negative, it will run the
motor in opposite direction.







































































