



























15
28 aprile 2021
Moreover, also considering the motors’ speed, our actuator has a 3d workspace. The figures
below show the Torque
–
Speed characteristic (Figure 3-13) and the VSA workspace (Figure
Figure 3-13 Torque - Speed characteristic.
Figure 3-14 Torque - Speed - Stiffness Workspace.
3.2.2
Mathematical model
The following mathematical functions and their parameters describe the mathematical model of
our agonistic/antagonistic VSA.
equilibrium point
𝑿
𝒆
=
(𝒒
𝟏
+ 𝒒
𝟐
)
𝟐
output stiffness
𝜎 = 𝑎
1
𝑘
1
cosh(𝑎
1
(𝑥
− 𝑞
1
)) + 𝑎
2
𝑘
2
cosh(𝑎
2
(𝑥
− 𝑞
2
))
output torque
𝜏 = 𝑘
1
sinh(𝑎
1
(𝑥
− 𝑞
1
)) + 𝑘
2
sinh(𝑎
2
(𝑥 − 𝑞
2
))
elastic energy
𝐻 =
𝑘
1
(cosh(𝑎
1
(𝑥 − 𝑞
1
)) − 1)
𝑎
1
+
𝑘
2
(cosh(𝑎
2
(𝑥 − 𝑞
2
)) − 1)
𝑎
2
value
Unit
k
1
0,0026
[Nm]
a
1
8.9995
[1/rad]
k
2
0.0011
[Nm]
a
2
8.9989
[1/rad]
Summary of Contents for qbmove Advanced Kit
Page 2: ...www qbrobotics com ...
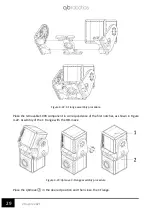
Page 15: ...12 28 aprile 2021 Figure 3 7 Snap on mechanism Figure 3 8 Examples of connection ...
Page 40: ...37 28 aprile 2021 ...
Page 63: ...60 28 aprile 2021 IMPORTANT Remember to power the qbmove or the chain before using it ...
Page 97: ...94 28 aprile 2021 This page was intentionally left blank ...







































































