

























9
28 aprile 2021
3.2
Technical data
Mechanical and electrical characteristics of the qbmove Advanced:
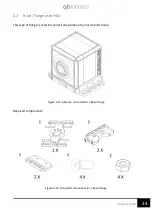
Figure 3-2 qbmove Advanced.
①
output
shaft;
②
daisy-chain RS485;
③
USB port.
operating data
(quantity)
(unit)
(value)
mechanical
Continuous Output Power
[W]
33
Nominal Torque
[Nm]
5.5
Nominal Speed
[rad/s]
5.5
Peak Torque
[Nm]
6.8
Maximum Speed
[rad/s]
6.33
Maximum Stiffness
[Nm/rad]
83.5
Minimum Stiffness
[Nm/rad]
0.5
Nominal Stiffness
Variation Time
no load
[s]
0.25
max torque
[s]
0.25
Maximum Elastic Energy
[J]
0.88
Maximum Hysteresis
[°]
5
Maximum Deflection
Max stiffness
[°]
6
Min stiffness
[°]
50
Active Rotation Angle
[°]
±180
Angular Resolution
[°]
360/32768
Weight
[kg]
0.45
Electrical
Voltage Supply
[V]
24
Nominal Current
[A]
1.8
Maximum Current
[A]
3
Peak Current
[A]
13
control data
Nominal current (USB)
[A]
0.26
Electrical protocol
RS485/USB
-
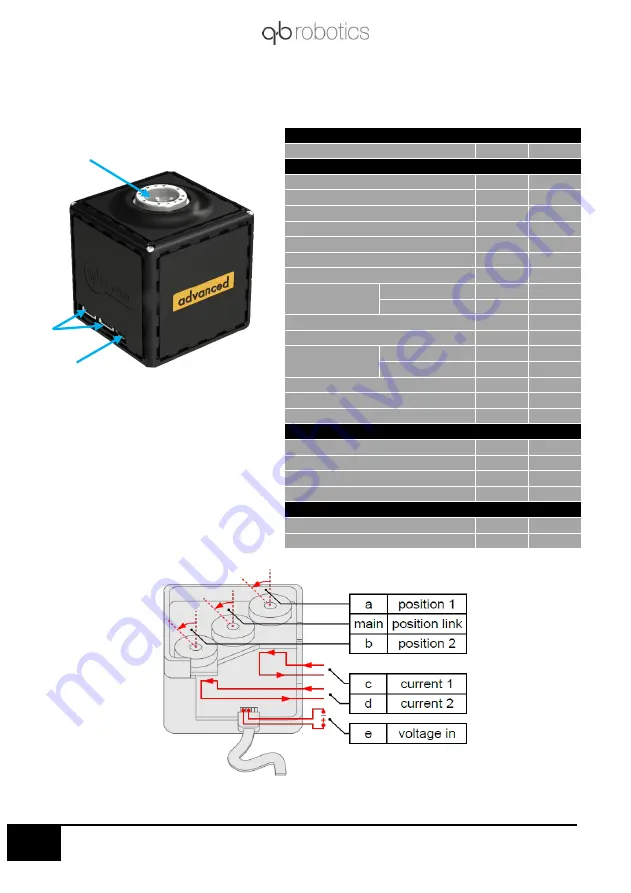
Figure 3-3 Sensors references.
①
③
②
Summary of Contents for qbmove Advanced Kit
Page 2: ...www qbrobotics com ...
Page 15: ...12 28 aprile 2021 Figure 3 7 Snap on mechanism Figure 3 8 Examples of connection ...
Page 40: ...37 28 aprile 2021 ...
Page 63: ...60 28 aprile 2021 IMPORTANT Remember to power the qbmove or the chain before using it ...
Page 97: ...94 28 aprile 2021 This page was intentionally left blank ...




























































