





























13
28 aprile 2021
3.2.1
Agonistic/Antagonistic VSA
The qbmove Advanced embeds the features of a servo motor and, moreover, the possibility of
adjusting the output shaft stiffness.
The Figure 3-9 shows a scheme of the agonistic/antagonistic VSA principle, implemented in our
actuator. Basically, there are two motors connected at the output shaft by non-linear springs, so
the output position
“x”
and the stiffness
“σ” depend on the motors’ positions “q
1
” and “q
2
”, on
the torque “τ” and on the
mathematical model of the system.
Figure 3-9 Agonist/Antagonistic VSA model.
All these quantities are each other connected, then, to evaluate a proper mathematical model
experimental data are needed.
Using a pendulum structure, a sinusoidal movement with different frequencies, and different
stiffness presets, the obtained results can be synthetized in the graphic below; where the
deflection “δ” is the
difference between the angular position of the output shaft
δ = x
- (q
1
+q
2
)/2
and the stiffness preset is (q
1
- q
2
)/2.
Figure 3-10 Experimental Torque Deflection Characteristic.
Summary of Contents for qbmove Advanced Kit
Page 2: ...www qbrobotics com ...
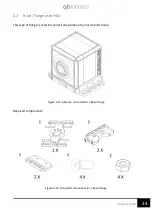
Page 15: ...12 28 aprile 2021 Figure 3 7 Snap on mechanism Figure 3 8 Examples of connection ...
Page 40: ...37 28 aprile 2021 ...
Page 63: ...60 28 aprile 2021 IMPORTANT Remember to power the qbmove or the chain before using it ...
Page 97: ...94 28 aprile 2021 This page was intentionally left blank ...





































































