



























57
28 aprile 2021
must execute:
sudo adduser user_name dialout
where
user_name
is the username under which the GUI is used. Once this command is
executed, it is necessary to log out and back in, for the changes to take effect.
6.2.2
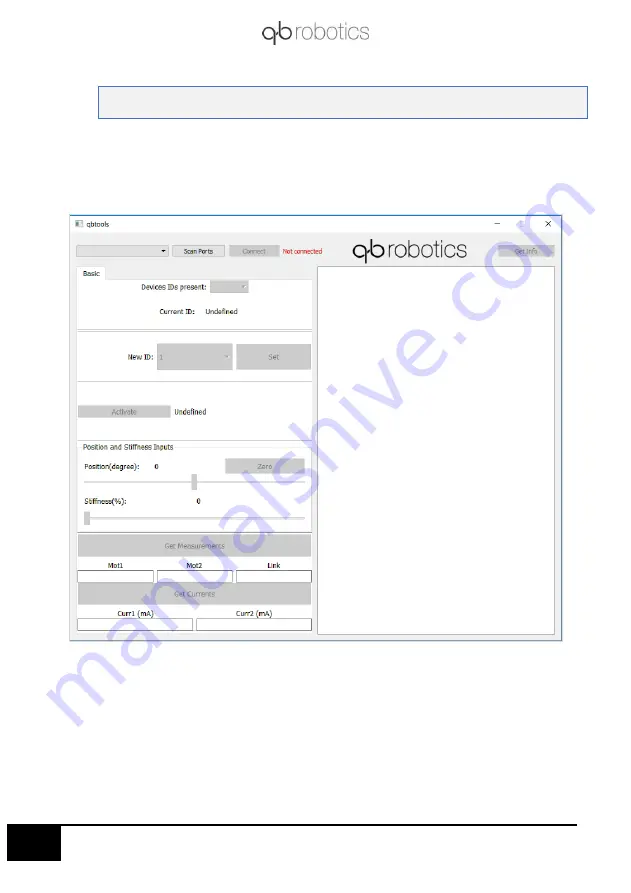
Main Layout
Application is structured in one tab only:
•
Basic:
Basic commands. ID setting, activation of the board, measurements and
currents reading, position and current inputs.
Figure 6-1: qbmove GUI main window
Summary of Contents for qbmove Advanced Kit
Page 2: ...www qbrobotics com ...
Page 15: ...12 28 aprile 2021 Figure 3 7 Snap on mechanism Figure 3 8 Examples of connection ...
Page 40: ...37 28 aprile 2021 ...
Page 63: ...60 28 aprile 2021 IMPORTANT Remember to power the qbmove or the chain before using it ...
Page 97: ...94 28 aprile 2021 This page was intentionally left blank ...







































































