
















Chapter 9 Specification
ADSD-S-S
91
9-6 Drive motor adapter table
Motor Parameter
Servo drive model
Motor Code
[*]
Motor Model
Rated Torque
(N.m)
Rated Speed
(rpm)
Rated Power
(kW)
15B
20B
30B
S60-006M30
0.6
3000
0.2
●
S60-013M30
1.3
3000
0.4
●
S60-019M30
1.9
3000
0.6
●
S80-013M30
1.3
3000
0.4
●
S80-024M30
2.4
3000
0.75
●
S80-035M20
3.5
2000
0.73
●
S80-040M25
4
2500
1.0
●
●
●
S90-024M30
2.4
3000
0.75
●
●
●
S90-035M20
3.5
2000
0.73
●
●
●
S90-040M25
4
2500
1.0
●
●
●
B101
S110-020M30
2
3000
0.6
●
B101
S110-040M20
4
2000
0.8
●
●
B102
S110-040M30
4
3000
1.2
●
●
B103
S110-050M30
5
3000
1.5
●
●
B102
S110-060M20
6
2000
1.2
●
●
B104
S110-060M30
6
3000
1.6
●
●
B301
S130-040M25
4
2500
1.0
●
●
B303
S130-050M25
5
2500
1.3
●
●
B304
S130-060M25
6
2500
1.5
●
●
B306
S130-077M25
7.7
2500
2.0
●
B302
S130-100M10
10
1000
1.0
●
●
B308
S130-100M15
10
1500
1.5
●
●
B309
S130-100M25
10
2500
2.6
●
B310
S130-150M15
15
1500
2.3
●
● indicated can match use
*:Motor code to set the drive parameter L002。
Chapter 10 Application examples
ADSD-S-S
92
Chapter 10 Application examples
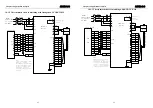
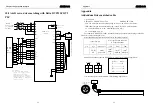
10-1 ADSD-S drive and numerical control system
10-1-1 The electrical schematic diagram with HNC-21T
RB
RB1
W
PE
Servo
motor
Encoder
Red
White
Black
Green
Built braking
resistor
Tw
is
te
d-
sh
ie
ld
w
ir
e
AC220/
230V 1-phase
or 3-phase
50/60Hz
CN2
5
A+
10
A-
4
B+
9
B-
3
Z+
8
Z-
2
U+
7
U-
1
1
V+
6
V-
12
W+
11
W-
13
+5V
14
GND
15
FE
CN1
Metallic shell
Note:
1.Each digital signal output
interface is software
programmable .The chart shows
is the factory default value
setting it can meet general
application , users can
according to what they need
to modify.
13
PULS+
4
PULS-
14
SIGN+
5
SIGN-
2
DO2
12
DOCOM
1
DI1
26
CZ
1
CP+
9
CP-
2
DIR+
10
DIR-
5
DALM
11
0V
7
EN
4
+24
3
PC
XS30/31/32
GSK-
218M
FG
Metallic
shell
ALM
SON
Metallic
shell
22
COM+
T
S
R
MCCB
ADSD-S-S
Control
MC
L1
L2
V
U







































































