





























Parker EME
Encoder input
33
192-300300N1 GVI Frames C, D & E 2019-9
8.7
Encoder input
8.7.1. Function
The Encoder inputs are multi-function inputs that can be used in different modes:
•
Active low digital input (with internal pull-up activated)
•
Active high digital input
•
Analog input (default)
The encoder inputs can be used as general purpose I/O pins, but are primarily designed to interface motor
feedback sensors. The inputs, when used for motor feedback, are grouped together as 1A+1B+1C for
primary sensor, and 2A+2B for secondary sensor (35p I/O only).
•
Analog (SinCos) sensor : 2 x analog inputs (ENC_1A, ENC_1B)
The internal pull-up is activated by software settings. Threshold level for low signal is 2V and the max usable
frequency of an open-drain type encoder is 20kHz.
ENC1 pull-up is controlled from the main MCU. ENC2 pull-up is controlled by the supervision MCU. If no
supervision CPU is mounted, ENC2 is hard-wired to pull-up type. Main MCU reads both ENC1 and ENC2,
while supervision CPU only has access to ENC2.
8.7.2. Protection
Encoder inputs are protected against B+, B-, and ESD.
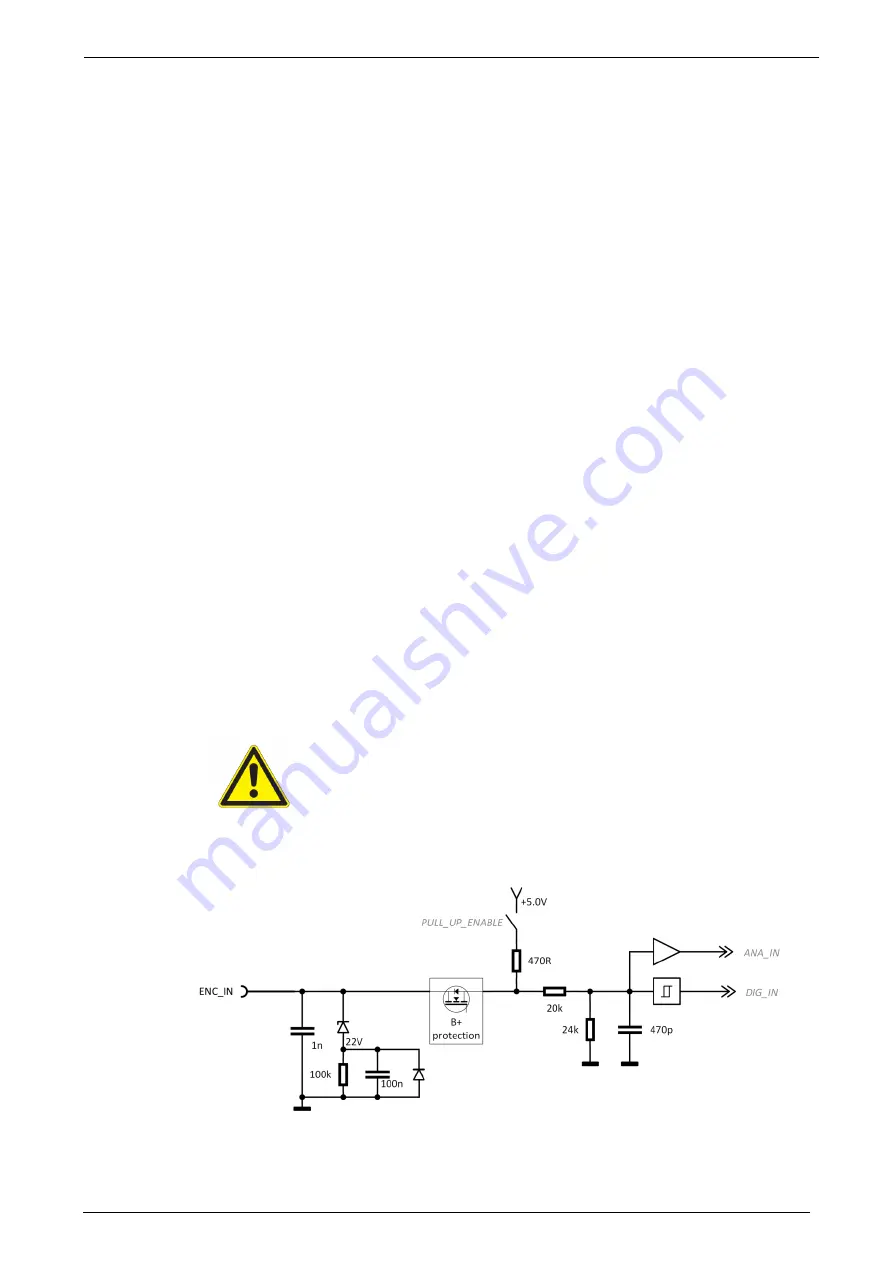
8.7.3. Circuit
WARNING
Electric noise – Risk of personnel injury/damage to equipment
To minimize risk of electric noise causing disruptions of encoder signals, care should be taken
to separate encoder cabling from motor power cables or e.g. electric brake actuation wiring.
Figure 20 Schematic of the Encoder input circuit







































































