





























I/O interface description
GVI Product Manual: Frames C, D & E
40
192-300300N1 GVI Frames C, D & E 2019-9
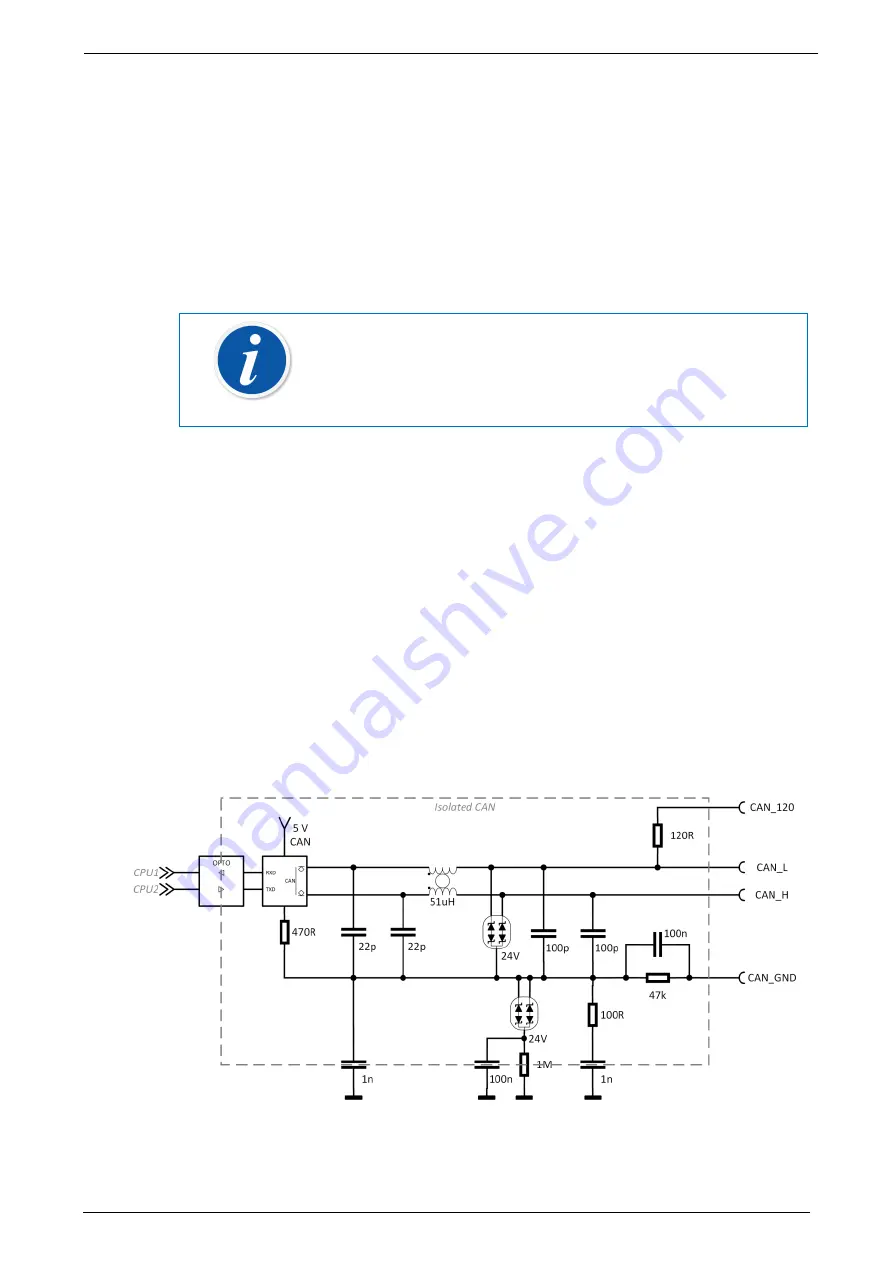
Isolated CAN bus interface with Opto-couplers and in5 V supply from isolated DC/DC.
Communication circuits with common-mode filter (choke and capacitor).
Physical Interface according to ISO 11898-2.
The CAN driver gives maximum amplitude on the CAN_High to CAN_Low signal.
Ground reference for CAN, CAN_GND, must be routed together with CAN_High and CAN_Low in the CAN-
bus to avoid communication problems. There is no internal connection between CAN_GND and B- except for
ESD protection and EMC suppression components.
NOTE
It is not recommended to use units with +3.3 V CAN drivers in this type of application with high
current motor controllers. The noise margins will be reduced and there will be high risk for
CAN error frames in the CAN system.
8.13.1.1
CAN_120R
CAN-cabling shall use a pair of twisted wires for CAN_High and CAN_Low wires.
The CAN-cabling shall have a characteristic impedance of 120
Ω
and both physical ends of the CAN Bus
shall be terminated with 120
Ω
between CAN_High and CAN_Low for best possible noise immunity.
The motor controller has an internal 120
Ω
termination resistor connected between CAN_Low and
CAN_120R pin. To activate internal termination, CAN_120R shall be connected to CAN_High with a jumper
in the vehicle wire harness.
8.13.2. Protection
Protected against B+, B- and ESD.
8.13.3. Circuit
Figure 27 Schematic of the CAN circuit







































































