





























Parker EME
HW ID1 and ID2 inputs
31
192-300300N1 GVI Frames C, D & E 2019-9
8.4.3. Circuit
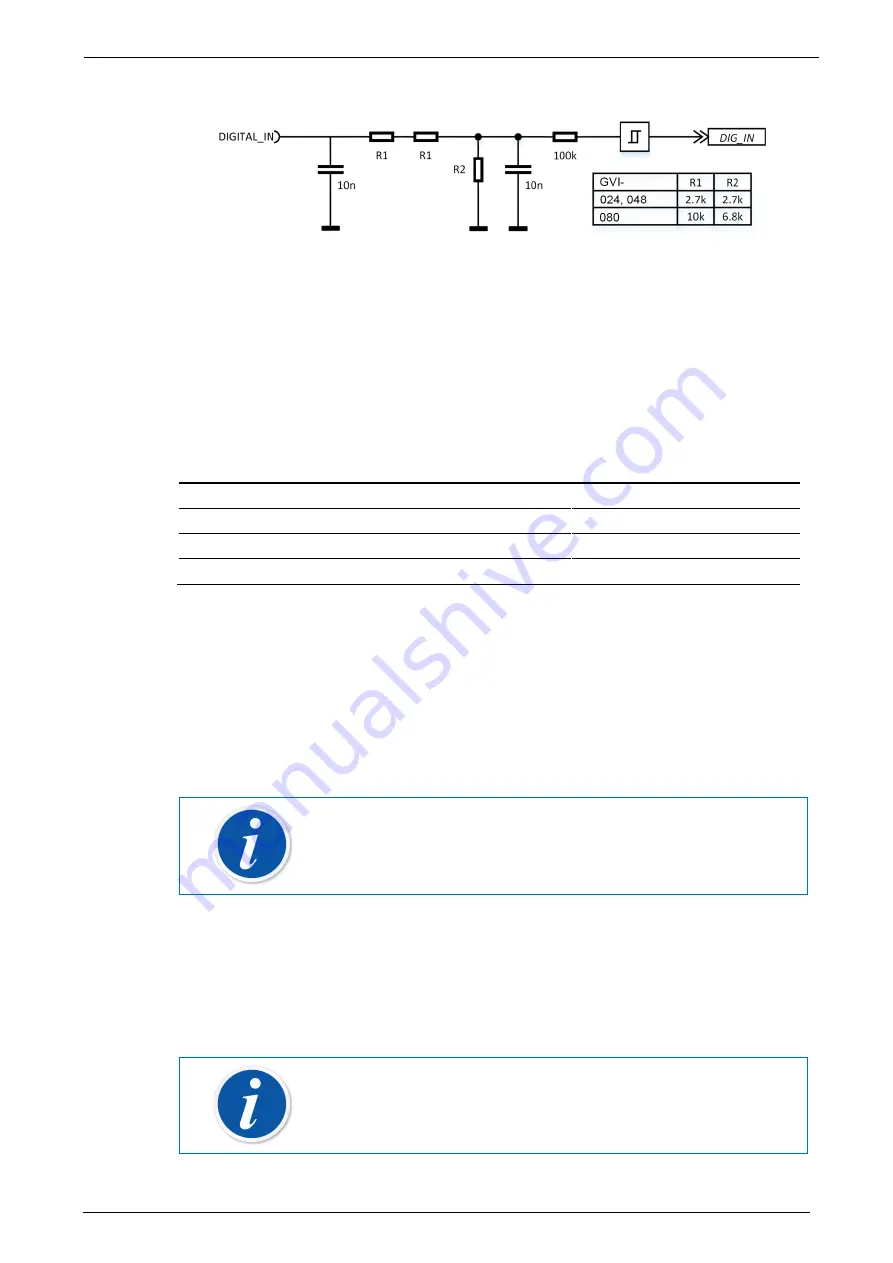
Figure 17. Schematic of the Digital input circuit
8.5
HW ID1 and ID2 inputs
8.5.1. Function
HW ID CANopen ID
HW ID2
HW ID1
3
SW defined
1 (open)
1 (open)
2
SW defined
1 (open)
0 (connected to HW ID gnd)
1
SW defined
0 (connected to HW ID gnd)
1 (open)
0
SW defined
0 (connected to HW ID gnd)
0 (connected to HW ID gnd)
Table 7. HW ID1 and ID2 function
HW_ID inputs are used to select unique parameter sets for different functions when several inverters with
identical software are present in the same system (on the same CAN bus). This can be achieved by adding
jumpers in the cable harness for the different nodes. The HW_ID jumper configuration controls which CAN ID
and which functionality is used for each position in the system. The HW_ID:s are commonly used to
differentiate between e.g. left and right traction controller or hydraulic pump controller in a forklift truck.
CANopen Node ID for each HW ID is defined by the application software. By default the CANopen Node ID
is HW ID + 5.
NOTE
For GVI 35 pin version; Digital input 5 and 6 can be used for the same function. For correct HW
ID with I/O version GVI the K1 pins shall be open for 0 and connected to B+ for 1.
8.5.2. Protection
HW ID1 and HW ID2 inputs have a capacitor to B- for ESD protection. The input is protected against
unintentional connection to B+ and B-.
NOTE
The HW_ID_GND pins are not protected against short circuit to B+.





















































