





























Setting
up Compax3
C3I12T11
126
192-120113 N08 C3I12T11 - December 2010
Behavior with software end limits of a referenced axis
Position within
target outside
Position outside
target outside and aiming in the
opposite direction of the travel
range
Position outside
target within and aiming in the
direction of the travel range
JOG +/-
Positioning up to the end
limits
No Error
No positioning
No Error
Positioning
MoveAbs,
MoveRel,
RegSearch,
RegMove
No positioning
Error
No positioning
Error
Positioning
Gearing
Positioning up to the end
limits
Error
No positioning
Error
No positioning
Error
Velocity
Positioning up to the end
limits
Error
No positioning
Error
Positioning
Hardware end limits
The error reaction when reaching the hardware end limits can be set:
Possible settings for the error reaction are:
No response
Downramp / stop
Downramp / stromlos schalten (standard settings)
Hardware end limits are realized with the aid of end switches.
These are connected to X12/12 (input 5) and X12/13 (input 6) and can be
(de)activated separately in the C3 ServoManager under Configuration: End limits.
After a limit switch has been detected, the drive decelerates with the ramp values
set for errors (error code 0x54A0 at X12/12 active, 0x54A1 at X12/13 active) and
the motor is switched to currentless.
Please make sure that after the detection of the end switch there is enough travel
path left up to the limit stop.
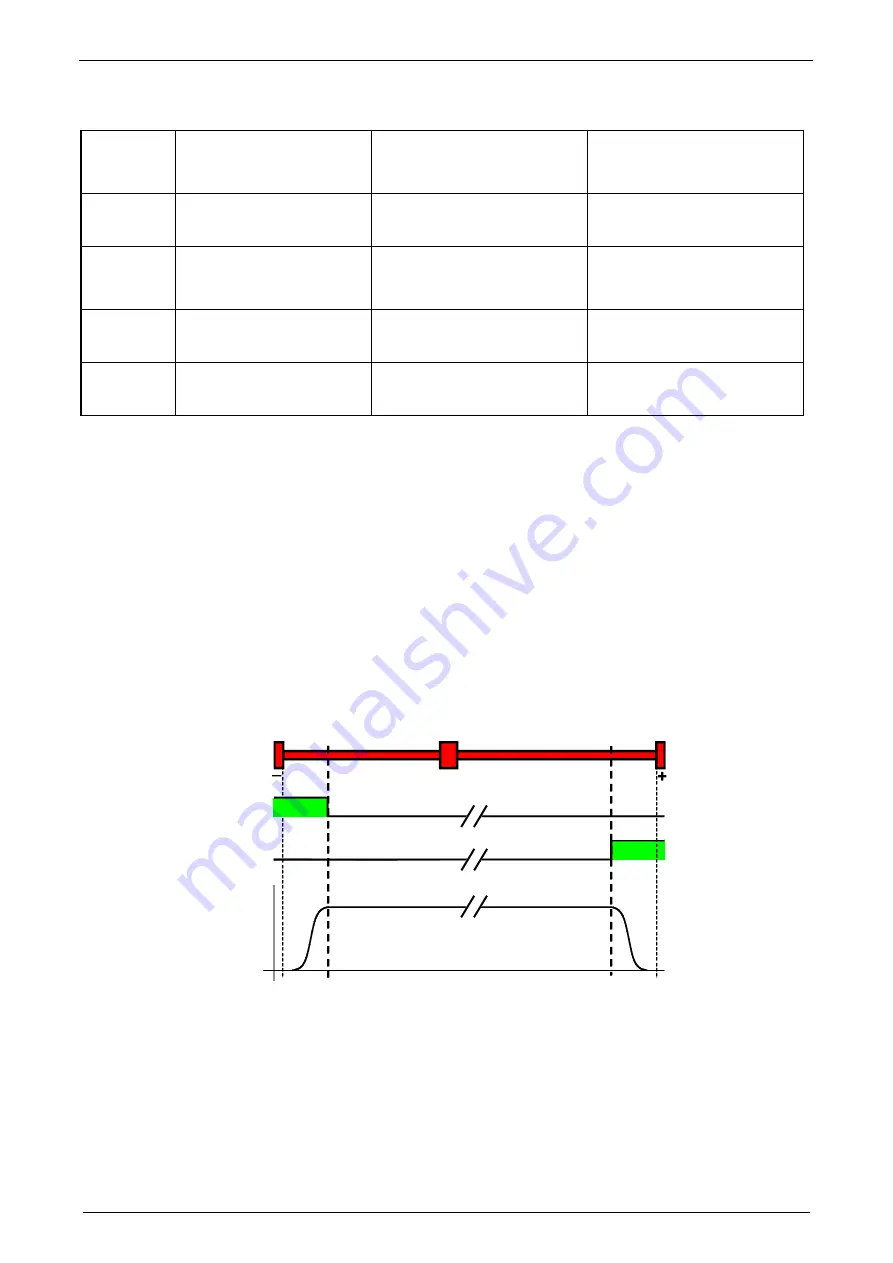
2
V
3
4
1
1: Limit switch E5 (X12/12)
2: Limit switch E6 (X12/13)
3: Limit switch position E5 (X12/12)
4: Limit switch position E6 (X12/13)
The
assignment of the end switches
(see on page 127) can be changed!
The limit switches must be positioned so that they cannot be released towards the
side to be limited.
Please note:







































































