





























Technical Manual PD4-E-M (EtherCAT)
6 Operating modes
6.6.5 Use
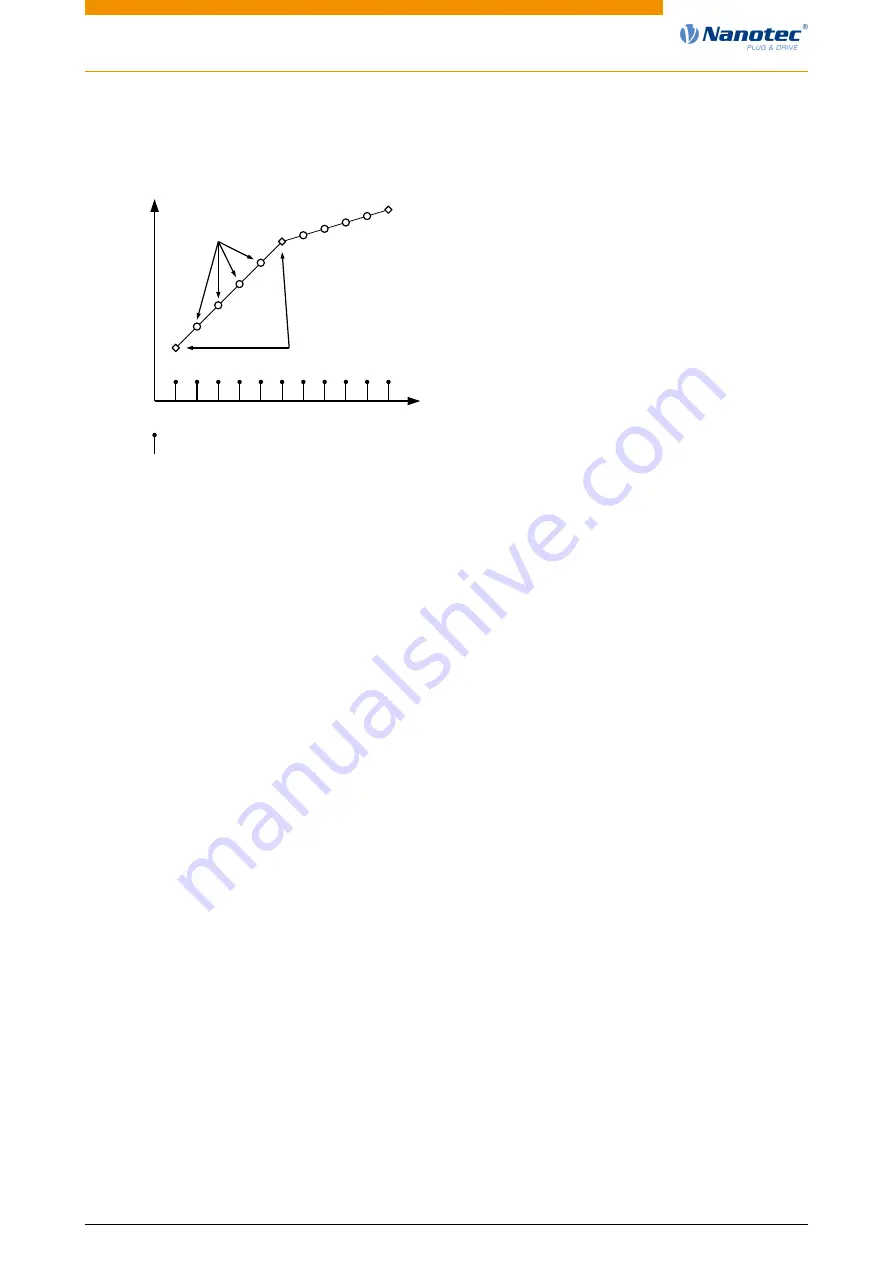
The controller follows a linearly interpolated path between the current position and the preset target
position. The (next) target position must be written in record 60C1
:01
h
.
Synchronisation
Data given
Own interpolated
data
t
po
si
tio
n
In the current implementation, only
•
linear interpolation
•
and a target position
are supported.
6.6.6 Setup
The following setup is necessary:
•
:01
h
: Time between two passed target positions in ms.
•
:06
h
: This object is to be set to "1" to be able to modify the target position in object 60C1
:01
h
.
•
h
(Profile Velocity): Maximum speed with which the position is to be approached
•
The speed is is limited by 607F
(Max Profile Velocity) and 6080
h
(Max Motor Speed); the smaller
value is used as the limit.
•
To be able to turn the motor, the power state machine is to be set to the Operation enabled state
(see CiA 402 Power State Machine)
6.6.7 Operation
After setting up, the task of the higher-level controller is to write the target positions to object 60C1
:01
h
in time.
6.7 Cyclic Synchronous Position
6.7.1 Overview
Description
In this mode, the controller receives an absolute position preset via the fieldbus at fixed time intervals
(referred to in the following as a cycle). The controller then no longer calculates any ramps, but rather
only follows the presets.
The target position is transferred cyclically (via PDO). Bit 4 in the controlword does not need to be set
(unlike the Profile Position mode).
Version: 1.0.1 / FIR-v1748
70







































































