





























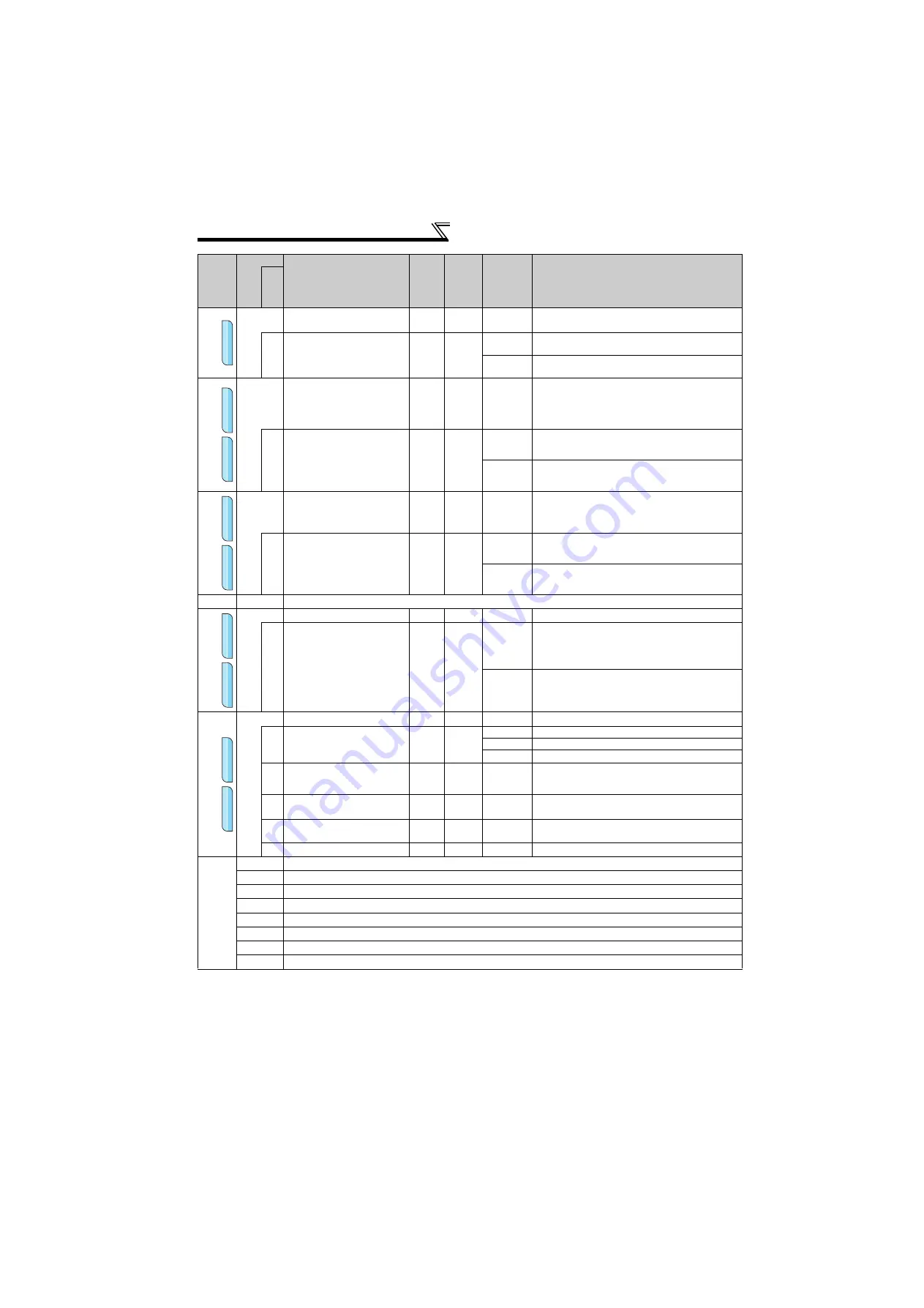
136
S
p
eed det
e
ct
ion
filt
e
r fu
n
cti
o
n
823
Speed detection
filter 1
0.001s
0.001s 0 to 0.1s
Set the primary delay filter for the speed feedback.
833
Speed detection
filter 2
0.001s
9999
0 to 0.1s
Second function of
Pr. 823
(valid when RT signal is
on)
9999
No function
C
u
rrent
loop
pro
port
ional gai
n
set
ting
824
Torque control P gain 1
1%
100%
0 to 200%
Set the proportional gain for the current control of the
q and d axes. (Increasing the value improves
trackability in response to a current command
change and reduces current variation with
disturbance.)
834
Torque control P gain 2
1%
9999
0 to 200%
Second function of
Pr. 824
(valid when the RT
terminal is on)
9999
No function
Current
c
ont
rol
in
te
g
ra
l t
im
e
s
e
tt
in
g
825
Torque control integral time
1
0.1ms
5ms
0 to 500ms
Set the integral time for the current control of the q
and d axes. (Decreasing the value shortens the time
taken to return to the original torque if current
variation with disturbance occurs.)
835
Torque control integral time
2
0.1ms
9999
0 to 500ms
Second function of
Pr. 825
(valid when the RT signal
is on)
9999
No function
—
826
Refer to
Pr. 74
.
To
rque det
ec
tion
filt
er f
u
nct
ion
827
Torque detection filter 1
0.001s
0s
0 to 0.1s
Set the primary delay filter for the current feedback.
837
Torque detection filter 2
0.001s
9999
0 to 0.1s
Second function of
Pr. 827
(valid when the RT signal
is on)
9999
No function
S
peed f
eed f
o
rwar
d co
nt
rol,
model
adapt
iv
e sp
eed c
ont
rol
828
Model speed control gain
1%
60%
0 to 1000% Set the gain for model speed controller.
877
Speed feed forward control/
model adaptive speed
control selection
1
0
0
Normal speed control is exercised
1
Speed feed forward control is exercised.
2
Model adaptive speed control is enabled.
878
Speed feed forward filter
0.01s
0s
0 to 1s
Set the primary delay filter for the speed feed forward
result calculated using the speed command and load
inertia ratio.
879
Speed feed forward torque
limit
0.1%
150%
0 to 400%
Limits the maximum value of the speed feed forward
torque.
880
Load inertia ratio
0.1
7
0 to 200
times
Set the load inertia ratio.
Inertia ratio found by easy gain turning.
881
Speed feed forward gain
1%
0%
0 to 1000% Set the feed forward calculation result as a gain.
—
830
Refer to
Pr. 820
.
831
Refer to
Pr. 821
.
832
Refer to
Pr. 74
.
833
Refer to
Pr. 823
.
834
Refer to
Pr. 824
.
835
Refer to
Pr. 825
.
836
Refer to
Pr. 74
.
837
Refer to
Pr. 827
.
Func
tio
n
Parameter
Name
Incre
ments
Initial
Value
Range
Description
Re
la
te
d
p
ara
m
e
te
rs
VectorV
e
c
to
r
Vector
SensorlessS
e
n
s
o
rl
e
s
s
Sensorless
VectorV
e
c
to
r
Vector
SensorlessS
e
n
s
o
rl
e
s
s
Sensorless
VectorV
e
c
to
r
Vector
SensorlessS
e
n
s
o
rl
e
s
s
Sensorless
VectorV
e
c
to
r
Vector
SensorlessS
e
n
s
o
rl
e
s
s
Sensorless
VectorV
e
c
to
r
Vector







































































