





























10 USING A FULLY CLOSED LOOP SYSTEM
10.4 Startup
175
10
Setting the fully closed loop dual feedback filter
Use auto tuning or a similar mode to adjust the gain in the same way as when using semi closed loop control while [Pr. PE08
Fully closed loop dual feedback filter] is being set to the initial value (setting value = 10).
Adjust the dual feedback filter while observing the servo operation waveforms with the graph function or a similar function of
MR Configurator2.
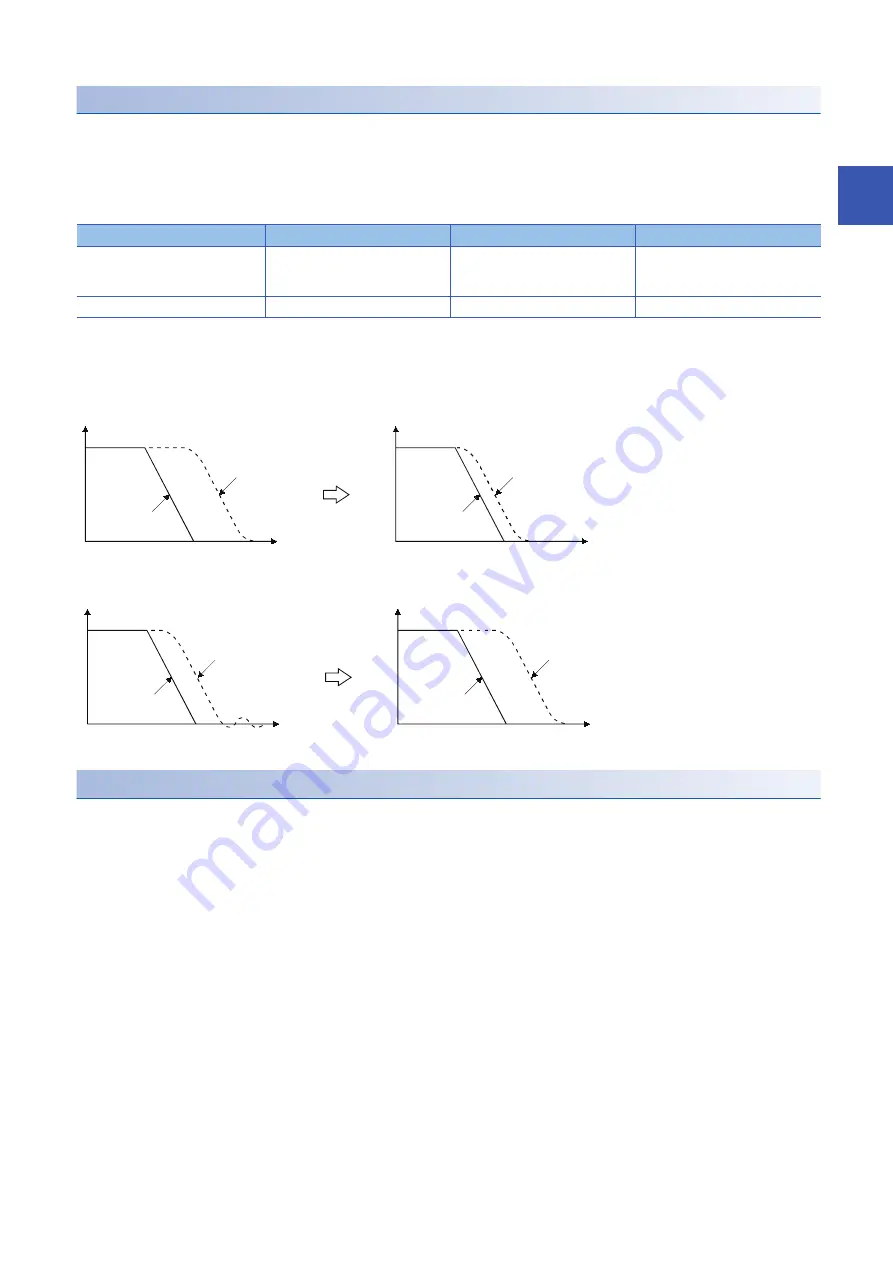
The operation status of the dual feedback filter varies depending on the setting value as shown below.
When the setting value for the dual feedback filter is increased, the settling time becomes shorter. However the vibration of
the servo motor will be larger because the servo motor becomes susceptible to the vibrations of the load-side encoder.
For the dual feedback filter, set a value that is equal to or smaller than a half of the setting value for PG2.
• To shorten the settling time: Increase the value for the dual feedback filter.
• To suppress vibration: Decrease the value for the dual feedback filter.
Load-side encoder resolution setting
When using an A/B/Z-phase differential output rotary encoder, set the resolution in [Pr. PE51 Load-side encoder resolution
setting].
When using an A/B/Z-phase differential output linear encoder, set [Pr. PE51] to "0".
• [Pr. PE51 Load-side encoder resolution setting]
Set the resolution of the A/B/Z-phase differential output rotary encoder used on the load-side.
When an A/B/Z-phase differential output type encoder is connected, the value set to this servo parameter is used to determine
whether it is a rotary encoder or a linear encoder.
0: Linear encoders
Other than 0: Rotary encoders
Setting value of [Pr. PE08]
Control mode
Vibration
Settling time
1
to
4499
Dual feedback
Hardly occurs
to
Easily occurs
Longer
to
shorter
4500
Fully closed
Droop pulses
Command
Droop pulses
Command
Time
Time
Droop pulses
Command
Droop pulses
Command
Time
Time





















































