


























7 - 2
7 Selection
MITSUBISHI CNC
7-1 Selection of the servomotor
7-1-1 Outline
It is important to select a servomotor matched to the purpose of the machine that will be installed. If the
servomotor and machine to be installed do not match, the motor performance cannot be fully realized, and it will
also be difficult to adjust the parameters. Be sure to understand the servomotor characteristics in this chapter to
select the correct motor.
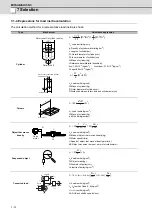
(1) Motor inertia
The servomotor series is mainly categorized according to the motor inertia size. The features in Table 7-1
are provided according to the motor inertia size.
Table 7-1 Motor inertia
Select a medium inertia motor when interpolation precision is required, or for machines having a large load
inertia. Select a low inertia motor when a shorter positioning time is required by machines having a small
amount of inertia. In general, use a medium inertia motor for basic feed axis of machine tools, and use a low
inertia motor for machine tool auxiliary axes, peripheral axes, and general industrial machine positioning.
The servomotor has an optimum load inertia scale. If the load inertia exceeds the optimum range, the control
becomes unstable and the servo parameters become difficult to adjust. When the load inertia is too large,
decelerate with the gears (The motor axis conversion load inertia is proportional to the square of the
deceleration ratio.), or change to a motor with a large inertia.
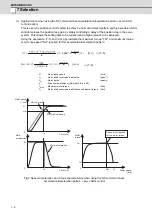
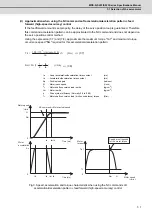
(2) Rated speed
Even with motors having the same capacity, the rated speed will differ according to the motor.
The motor's rated output is designed to be generated at the rated speed, and the output P (W) is expressed
with expression (7-1). Thus, even when the motors have the same capacity, the rated torque will differ
according to the rated speed.
P = 2
π
NT (W) ---(7-1)
N: Motor speed (1/sec)
T: Output torque (N.m)
In other words, even with motors having the same capacities, the one with the lower rated speed will
generate a larger torque. If generated torque is the same, the drive unit capacity can be downsized. When
actually mounted on the machine, if the positioning distance is short and the motor cannot reach the
maximum speed, the motor with the lower rated speed will have a shorter positioning time. When selecting
the motor, consider the axis stroke and usage methods, and select the motor with the optimum rated speed.
Motor model
Medium inertia motor
Low inertia motor
Motor series
HF series
HF-KP series
Inertia
The flange size is large.
The inertia is comparatively large.
The flange size is small.
The inertia is small.
Acceleration/
deceleration
The acceleration/deceleration time constant does not
change much even for a low inertia load.
The effect of the motor inertia is large.
Acceleration/deceleration is possible with a short time
constant in respect to low inertia loads.
The effect of the motor inertia is small.
Installation
The motor size in respect to the output capacity is
large, and the installation space is large.
The motor size in respect to the output capacity is
small, and the installation space is smaller.
Disturbance
characteristics
The effect of disturbance is small.
The effect of disturbance is large.
Speed
fluctuation
The effect of the torque ripple and cogging torque is
small, and speed fluctuation does not occur easily.
The effect of the torque ripple and cogging torque is
large, and speed fluctuation occurs easily.
Suitability
Suitable for high precision interpolation control.
Suitable for high speed high frequency positioning.
Summary of Contents for MDS-D-SPJ3
Page 1: ......
Page 3: ......
Page 5: ......
Page 17: ......
Page 19: ......
Page 21: ......
Page 27: ......
Page 31: ......
Page 39: ...1 8 ...
Page 65: ...2 26 ...
Page 93: ...3 28 ...
Page 169: ...5 58 ...
Page 233: ...Appendix 2 10 ...
Page 257: ...Appendix 4 20 ...
Page 280: ......
Page 284: ......







































































