





























63
6.
Pilih [Test (Pengujian)] dan jalankan operasi pengujian sebelum
mendaftarkan pengaturan.
Ikuti pesan yang ditampilkan pada layar dan selesaikan operasi
pengujian.
Jika hasil operasi pengujian tidak memuaskan, ulangi pengaturan.
CATATAN:
Untuk mendaftarkan pengaturan jarak setelah navigasi
pengujian, simpan laporan pengujian dengan mengikuti petunjuk
pada layar. Kemudian tekan kunci
untuk menyelesaikan
pendaftaran setelah pesan [Saved successfully. (Berhasil
disimpan.)] muncul. Ketika pendaftaran ini selesai, layar kembali ke
layar pemilihan menu.
CATATAN:
Robot Pemotong berhenti secara otomatis di dekat
titik keberangkatan pemotong setelah navigasi pengujian.
Untuk mengulangi pengaturan atau mendaftarkan pro
fi
l baru,
sambungkan kembali Robot Pemotong secara manual ke stasiun
pengisian daya.
CATATAN:
Untuk melewati navigasi pengujian, pilih [Verify
(Veri
fi
kasi)] dan daftarkan pengaturan.
Saat pesan [Saved successfully. (Berhasil disimpan.)] muncul,
tekan kunci
.
7.
Ulang langkah (4) sampai (6) dan daftarkan hingga lima pro
fi
l
sesuai kebutuhan.
Menyesuaikan sudut keberangkatan dari stasiun
pengisian daya
[Menu atas] > [Main menu (Menu utama)] > [Navigation
preferences (Preferensi navigasi)] > [Departure angles (Sudut
mulai gerak)]
Atur sudut keberangkatan ketika Robot Pemotong langsung
berangkat dari stasiun pengisian daya. Dengan mengasumsikan titik
kontak penyambungan, menghadap stasiun pengisian daya, sebagai
0° (jam 12), Anda dapat mengatur dua sudut keberangkatan di antara
90° (jam 3) hingga 270° (jam 9) di searah jarum jam. Anda dapat
menyesuaikan prioritas eksekusi dari setiap sudut keberangkatan.
Apa “kemungkinan” yang menentukan prioritas
eksekusi?
Kemungkinan didapatkan ketika mengatur metode keberangkatan
dan sudut keberangkatan dari stasiun pengisian daya
mengekspresikan kemungkinan Robot Pemotong memprioritaskan
operasi berdasarkan konten yang diatur sebagai persentase.
Sebagai contoh, jika 25% dan 75% dimasukkan sebagai
kemungkinan untuk rentang 1 dan 2 ketika mengatur sudut
keberangkatan, ada 25% kemungkinan bahwa Robot Pemotong akan
berangkat pada sudut sembarang di dalam rentang 1.
►
Gbr.43:
1.
Rentang sudut keberangkatan 1
2.
Rentang sudut
keberangkatan 2
3.
Stasiun pengisian daya
Total nilai pengaturan “Kemungkinan” adalah 100%
Robot Pemotong mempertimbangkan total kemungkinan yang
dimasukkan dengan dua menu sub [Mower departing points (Titik
mulai gerak pemangkas)] dan [Departure angles (Sudut mulai gerak)]
untuk menjadi 100%, dan mengalokasikan metode dan sudut untuk
keberangkatan dari stasiun pengisian daya dengan tepat.
Sebagai contoh, jika tiga metode keberangkatan didaftarkan
dengan menu sub [Mower departing points (Titik mulai gerak
pemangkas)] dan kemungkinan untuk masing-masing diatur sebesar
20%, total kemungkinan adalah 60%. 40% kemungkinan yang
tersisa dialokasikan untuk prioritas eksekusi dari rentang sudut
keberangkatan 1 dan 2 yang diatur oleh menu sub [Departure
angles (Sudut mulai gerak)]. Di sini, jika 50% dan 50% dimasukkan
sebagai kemungkinan rentang sudut keberangkatan 1 dan 2, 40%
kemungkinan yang tersisa dialokasikan 50% masing-masing untuk
rentang 1 dan 2. Oleh karena itu, dalam hal total kemungkinan,
prioritas eksekusi dari rentang sudut keberangkatan 1 dan 2
dikalkulasi masing-masing sebagai 20% dan 20%.
Sebagai hasilnya, Robot Pemotong secara acak melakukan tiga
metode keberangkatan yang didaftarkan dengan menu sub [Mower
departing points (Titik mulai gerak pemangkas)] dan dua sudut
keberangkatan yang didaftarkan dengan menu sub [Departure angles
(Sudut mulai gerak)] dengan kemungkinan masing-masing sebesar
20%.
1.
Tekan
tombol pada panel kontrol.
[Main menu (Menu utama)] muncul.
2.
Pilih yang ditampilkan pada layar.
Menu sub muncul.
3.
Pilih [Departure angles (Sudut mulai gerak)].
Menu opsi muncul.
4.
Gunakan papan tombol untuk memasukkan kondisi yang
diinginkan ke bidang format opsi yang ditampilkan pada layar.
Rentang keluar dapat diatur di antara 90° dan 270°.
Opsi
Rincian
Exit range 1:
(Rentang keluar 1:)
Masukkan rentang sudut pertama untuk Robot
Pemotong berangkat dari stasiun pengisian
daya. (Anda juga dapat memasukkan hanya
satu rentang.)
Exit range 2:
(Rentang keluar 2:)
Masukkan rentang sudut kedua untuk Robot
Pemotong berangkat dari stasiun pengisian
daya.
Probability
(Probabilitas)
Masukkan kemungkinan keberangkatan
Robot Pemotong di setiap rentang sudut yang
diatur sebagai persentase.
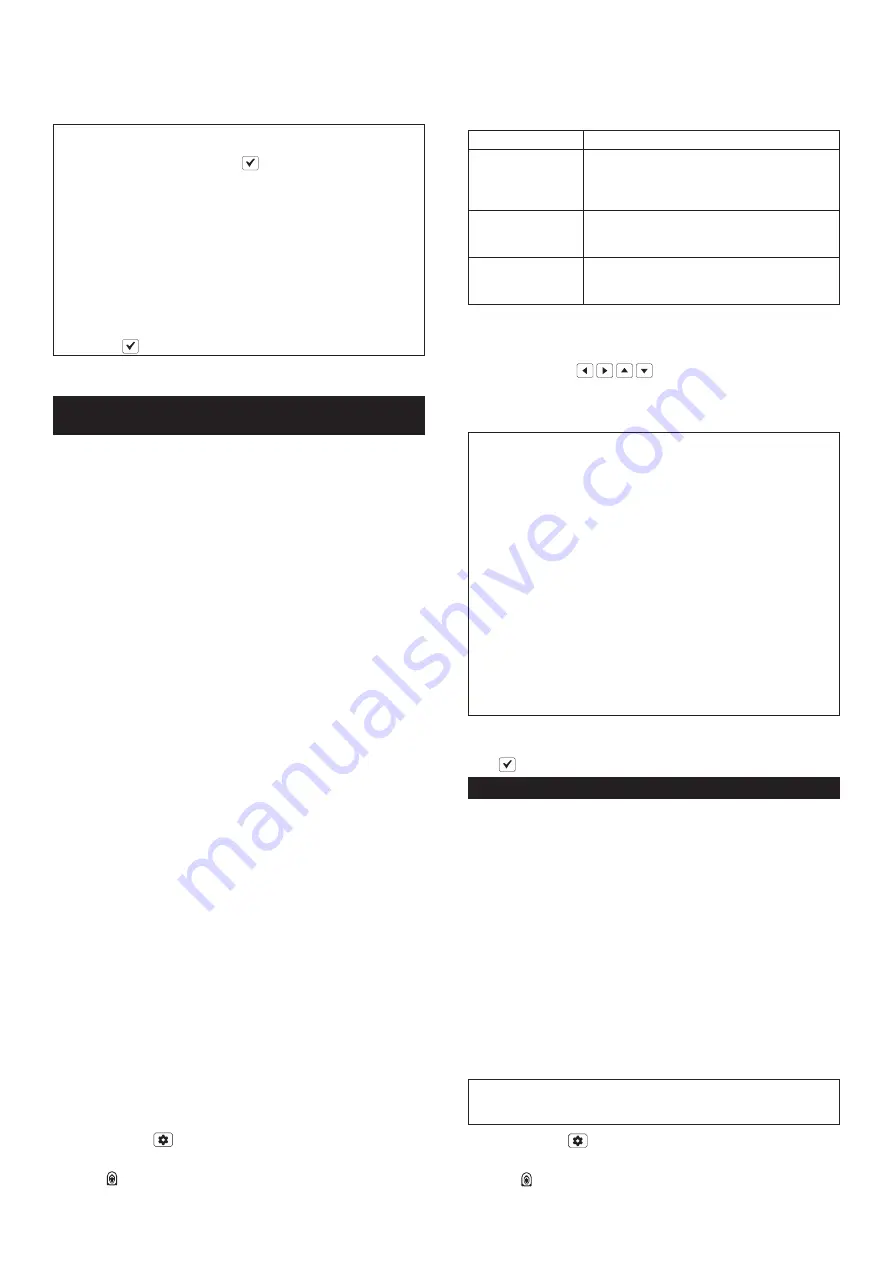
►
Gbr.44:
1.
Rentang keluar 1 (Rentang sudut pertama)
2.
Rentang
keluar 2 (Rentang sudut kedua)
3.
Kemungkinan
Mengatur sudut keberangkatan
(1) Gunakan
kunci /
/
/
untuk menyorot bidang entri sudut
dan kemungkinan yang akan diatur.
(2) Gunakan papan tombol dan masukkan sudut dan kemungkinan.
(3) Ulangi langkah 1 dan 2 dan masukkan semua bidang entri.
CATATAN:
Ketika memasukkan hanya [Exit range 1: (Rentang
keluar 1:)], kemungkinan eksekusi secara otomatis diatur ke 100%.
CATATAN:
Ketika hanya [Exit range 1: (Rentang keluar 1:)] yang
dimasukkan, kemungkinan eksekusi [Exit range 1: (Rentang keluar
1:)] tidak dapat diubah. Ketika entri ke [Exit range 2: (Rentang
keluar 2:)] dimulai setelah memasukkan [Exit range 1: (Rentang
keluar 1:)], kemungkinan eksekusi [Exit range 1: (Rentang keluar
1:)] dapat diubah.
CATATAN:
Selesaikan entri ke [Exit range 1: (Rentang keluar 1:)]
sebelum pengaturan [Exit range 2: (Rentang keluar 2:)]. Tidak
dimungkinkan untuk hanya memasukkan [Exit range 2: (Rentang
keluar 2:)].
CATATAN:
Kemungkinan eksekusi dari [Exit range 2: (Rentang
keluar 2:)] dikalkulasi secara otomatis sehingga total dengan
kemungkinan eksekusi [Exit range 1: (Rentang keluar 1:)] adalah
100%. Kemungkinan eksekusi [Exit range 1: (Rentang keluar 1:)]
dikurangi dari 100%, dan kemungkinan yang tersisa ditampilkan
secara otomatis sebagai kemungkinan eksekusi dari [Exit range 2:
(Rentang keluar 2:)].
5.
Pilih [Verify (Veri
fi
kasi)] dan daftarkan pengaturan.
Saat pesan [Saved successfully. (Berhasil disimpan.)] muncul, tekan
kunci
.
Menyesuaikan lebar navigasi o
ff
set
[Menu atas] > [Main menu (Menu utama)] > [Navigation
preferences (Preferensi navigasi)] > [Line trace o
ff
set (Jejak jalur
melebihi jangkauan)]
Lebar jalur ketika menavigasi di sepanjang kawat pembatas dan
kawat pemandu adalah o
ff
fset di dalam rentang pengaturan.
Apa itu navigasi o
ff
set?
Robot Pemotong bergerak di sepanjang berbagai kawat sambil
mendeteksi sinyal dari kawat. Navigasi o
ff
set dengan sengaja
menggeser jalur pergerakan ini sedikit demi sedikit dari setiap
kawat referensi untuk mencegah roda berulang kali melewati
bagian yang sama dari rumput. Robot Pemotong bergerak sambil
melakukan o
ff
set jalur secara acak di dalam rentang nilai yang diatur,
memungkinkan untuk mengurangi beban pada rumput di jalur yang
spesi
fi
k.
►
Gbr.45:
1.
Stasiun pengisian daya
2.
Kawat pembatas
3.
Kawat
pemandu
4.
Garis referensi tepi luar
5.
Lebar navigasi
o
ff
set
CATATAN:
Saat ada jalur sempit di area kerja, pertimbangkan
lebar o
ff
set maksimum yang akan memungkinkan Robot Pemotong
lewat.
1.
Tekan
tombol pada panel kontrol.
[Main menu (Menu utama)] muncul.
2.
Pilih yang ditampilkan pada layar.
Menu sub muncul.
BAHASA INDONESIA
Summary of Contents for RM350D
Page 3: ...3 1 Fig 3 1 2 3 Fig 4 1 Fig 5 1 2 Fig 6 1 2 Fig 7 5 1 2 3 4 Fig 8 1 2 3 4 5 6 Fig 9 1 Fig 10...
Page 4: ...4 1 Fig 11 Fig 12 Fig 13 1 Fig 14 1 2 3 Fig 15 1 2 Fig 16 1 2 3 Fig 17 Fig 18...
Page 5: ...5 3 2 1 1 Fig 19 Fig 20 3 2 1 1 5 4 Fig 21 1 2 Fig 22 Fig 23 Fig 24 1 Fig 25 Fig 26...
Page 6: ...6 Fig 27 1 Fig 28 1 2 3 Fig 29 Fig 30 Fig 31 Fig 32 1 2 Fig 33 Fig 34...
Page 7: ...7 Fig 35 1 3 4 1 2 Fig 36 Fig 37 1 2 3 Fig 38 Fig 39 4 4 4 1 2 3 4 4 Fig 40...
Page 8: ...8 1 2 3 4 Fig 41 1 Fig 42 3 1 2 Fig 43 1 2 3 Fig 44 1 2 3 4 4 5 5 Fig 45 Fig 46 Fig 47...
Page 9: ...9 1 2 3 4 5 6 Fig 48 1 2 Fig 49 Fig 50 Fig 51 Fig 52 Fig 53 Fig 54...
Page 10: ...10 Fig 55 Fig 56 Fig 57 Fig 58 Fig 59 Fig 60 Fig 61 Fig 62...
Page 11: ...11 Fig 63 1 2 3 4 Fig 64 2 1 Fig 65 Fig 66 1 2 Fig 67 Fig 68 1 2 3 4 5 A 6 Fig 69...
Page 12: ...12 3 1 2 Fig 70 1 2 4 3 Fig 71 1 2 Fig 72 Fig 73 1 Fig 74 1 2 3 Fig 75 Fig 76 Fig 77 Fig 78...
Page 13: ...13 1 2 3 Fig 79 1 Fig 80 1 2 3 Fig 81 1 2 3 2 Fig 82 1 Fig 83 2 3 1 Fig 84...
Page 47: ...47 2 6 6 mm 160 mm 1 2 71 1 2 3 4 3 72 1 2 4 73 5 74 1 AC AC LED 6 AC 65 mm...
Page 50: ...50 E200 E201 E202 STOP E203 IMU IMU E204 E206 LED 2 0 1 5 m...
Page 51: ...51 65 mm 150 cm 0 cm 30 30...
Page 134: ...134 2 6 6 mm 160 mm 1 2 71 1 2 3 4 3 72 1 2 4 73 5 74 1...
Page 135: ...135 Cabtire LED 6 Cabtire 65 mm...
Page 138: ...138 E080 E100 E101 E102 E103 E104 E105 E200 E201 E202 E203 IMU IMU E204 E206 LCD LED 2...
Page 139: ...139 0 1 5 m 65 mm 150 cm...







































































