

















Logosol Absolute Positioning Servo Drive LS-173AP
Doc # 712173008 / Rev. 1.06, 05/09/2002
Logosol, Inc.
••
1155 Tasman Drive
••
Sunnyvale, CA 94089 Tel: (408) 744-0974
••
www.logosolinc.com 31
Addressing
Each drive in the daisy-chained network has two addresses:
- Individual - for individual control of each drive. Its range is from 01h to 7Fh.
- Group - for simultaneous control of all group members by sending a single
command to their group address. It is in the range of 80h to FFh.
Both these addresses have to be set during the initialization process.
The group may have Group leader responsible to send status data. Its address is:
Group leader address = Group address - 80h.
If there is no group leader - no status data will be send after a group command.
Set Baud Rate
command must be sent only as a group command with no group leader,
otherwise communication problems may occur.
Set Address
command format
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Header
Preset Address
Command
code
Individual
Address
Group Address
Checksum
AA
00
21
01
FF
21
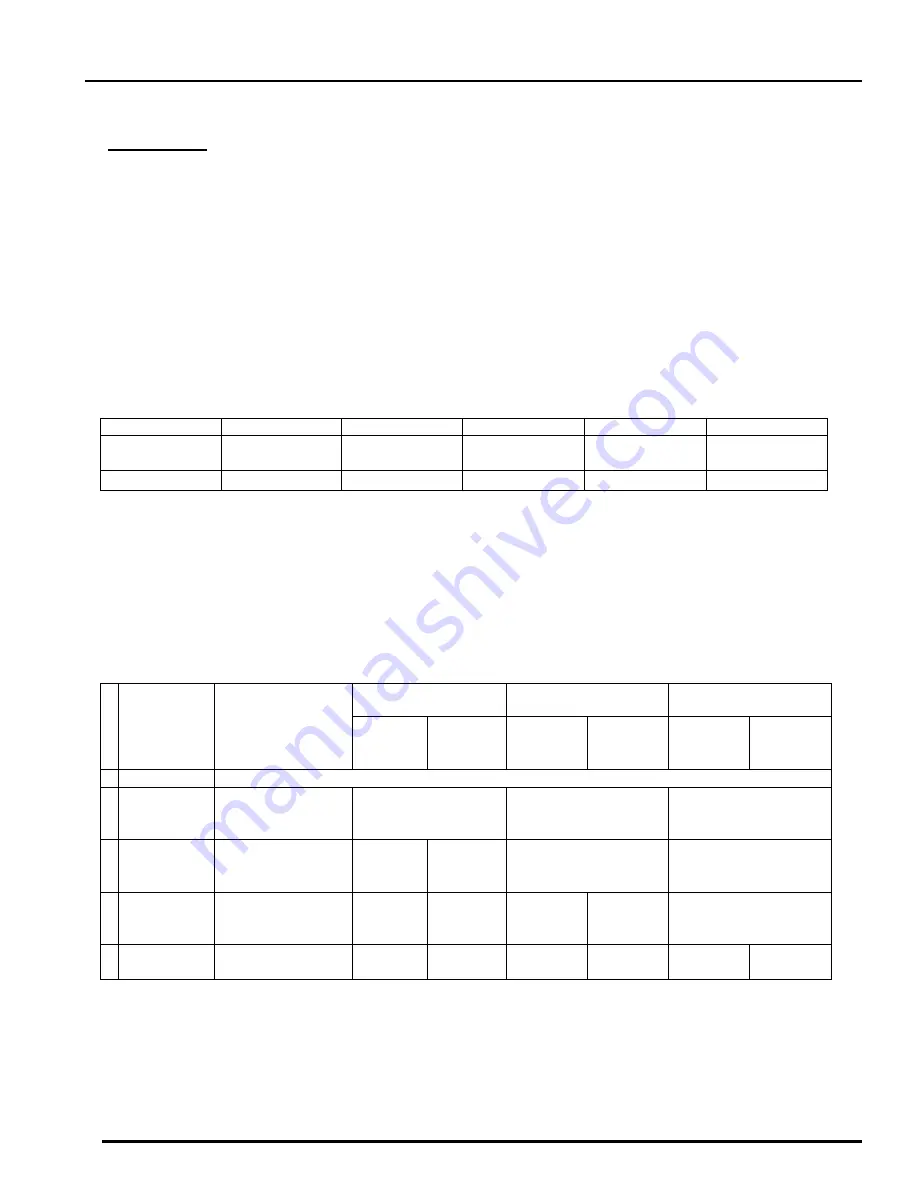
Setting the Addresses
After power-up and
Hard Reset
command all drives have their address set to 00h and only the
first drive (starting from the host) has its communication enabled. Consecutive
Set Address
commands are sent to address 00h until all drives are addressed. This procedure can be
executed once after
Hard Reset
. The table below shows the steps to address 3-drives
network.
Example of sequential addressing for three Servo drives
Drive 1
Drive 2
Drive 3
s
t
e
p
Command
Set address
Hexadecimal
Code
Individual
address
Group
address
Individual
address
Group
address
Individual
address
Group
address
0 Power-up
1 Hard Reset AA FF 0F 0E
address=00
communication
enabled
address=00
communication
disabled
address=00
communication
disabled
2 Set Address
Drive1 = 01
AA 00 21 01 FF 21
01
FF
address=00
communication
enabled
address=00
communication
disabled
3 Set Address
Drive2 = 02
AA 00 21 02 FF 22
01
FF
02
FF
address=00
communication
enabled
4 Set Address
Drive3 = 03
AA 00 21 03 FF 23
01
FF
02
FF
03
FF
Note:
Before start addressing
Hard Reset
command must be issued.






































































