





























Logosol Absolute Positioning Servo Drive LS-173AP
Doc # 712173008 / Rev. 1.06, 05/09/2002
Logosol, Inc.
••
1155 Tasman Drive
••
Sunnyvale, CA 94089 Tel: (408) 744-0974
••
www.logosolinc.com 16
byte. The checksum byte is 8 bit sum of the address byte, the command byte and the data
bytes. The number of data bytes depends on the particular command chosen. After a
command is issued, the corresponding controller will send back a status packet consisting of:
Status byte
0-16 optional bytes of status data
Checksum byte
The status byte contains basic status information about the LS-173AP, including a checksum
error flag for the command just received. The optional data bytes may include data such as
the position, velocity, etc. and are programmable by the host. The checksum byte is the 8 bit
sum of the status byte and the additional optional status data bytes. All 16-bit and 32-bit data
is send with the least significant byte first.
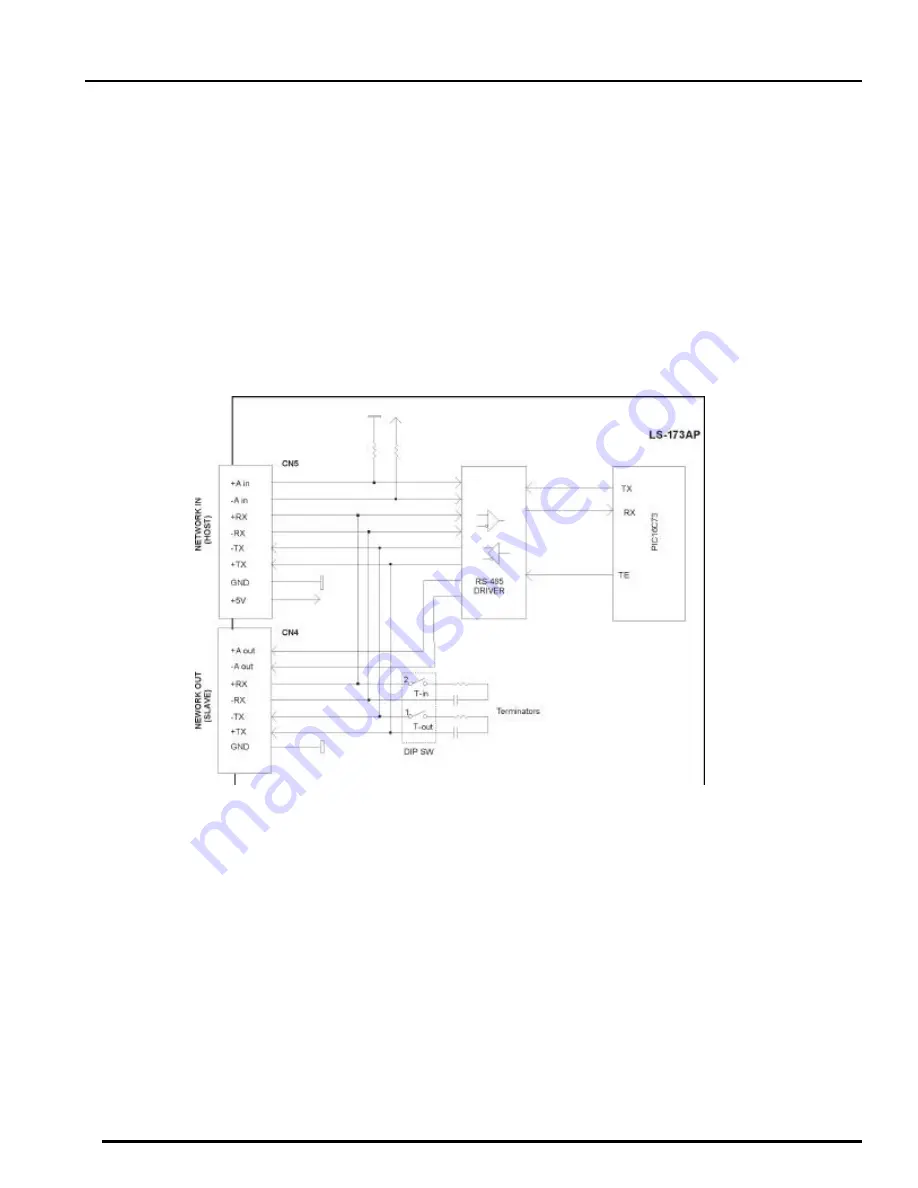
Servo Driver Serial Interface
Addressing
Rather than having to hard-wire or switch-select the address of each LS-173AP servo drive,
the host dynamically sets the address of each LS-173AP with the aid of the daisy-chained “A
in” and “A out” lines. This allows additional LS-173AP controllers to be added to an RS-485
network with no hardware changes. On power-up, “A in” of the first LS-173AP
is pulled low, its
communication is enabled and the default address is 0x00. When the
Set Address
command
is issued to give this LS-173AP new unique address, it will lower its “A out” pin. Connecting “A
out” pin to the “A in” pin of the next servo drive in the network will enable its communication at
default address of 0x00. Repeating this process allows a variable number of controllers
present to be given unique addresses. See “Initializing procedure and programming examples
for LS-173AP” later in this document.