





























17
User
Manual
for
ELD2
Servo
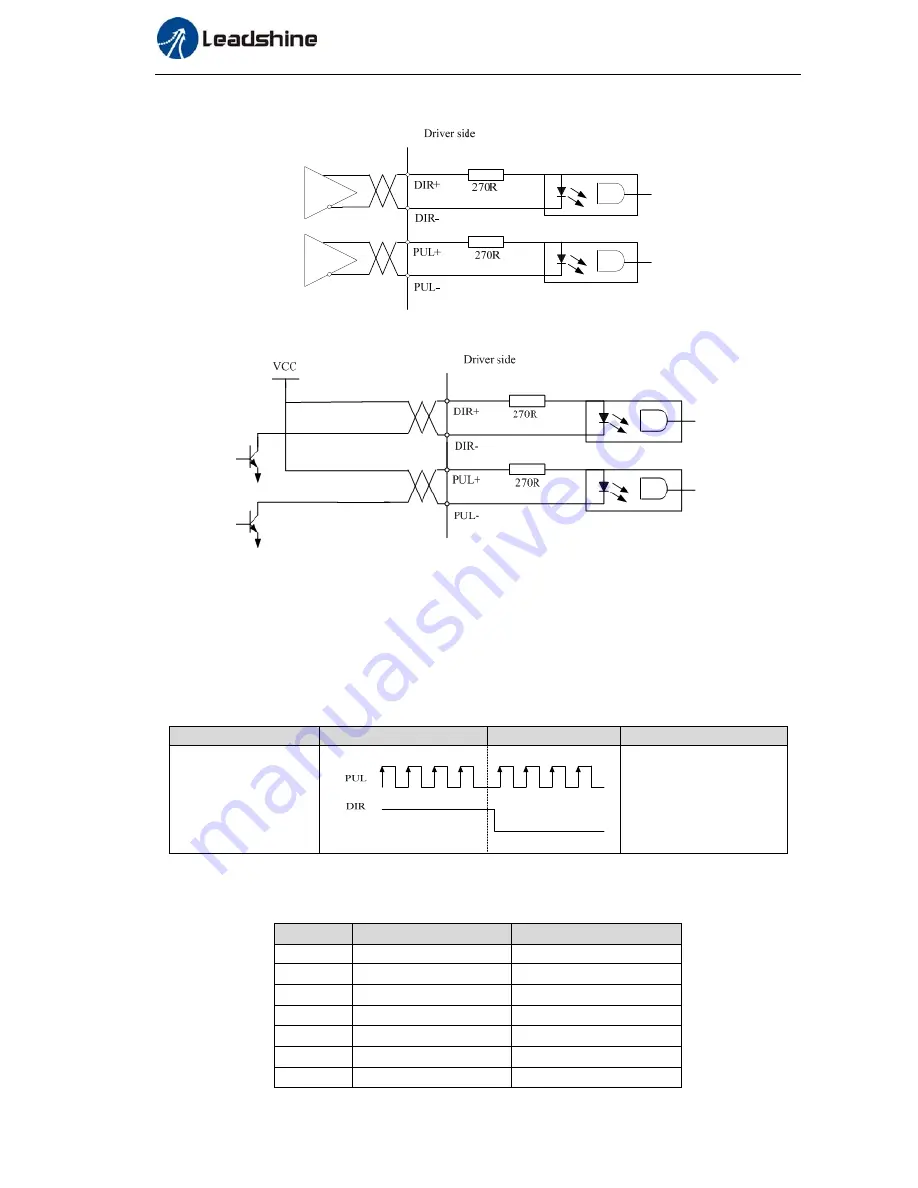
3.3.3 Pulse Input Interface
Figure
3
‐
6
Pulse
Input
Interface
Differential
Drive
Mode
Figure3
‐
7
Pulse
Input
Interface
Single
Terminal
Drive
Mode
(1)
In order to transmit pulse data properly , we recommend using the differential drive mode.
(2)
The differential drive mode, AM26LS31, MC3487 or similar RS422 line drive.
(3)
Using of single-ended drive will cause reduction of the operation frequency.
(4)
The user provide external power supply for single-ended drive. However, if current polarity connect
reversely, servo driver is damaged.
(5)
The form of pulse input is the following form 3.7 below, while the arrows indicates the count .
Table
3.7
Pulse
Input
Form
Pulse
command
form
CCW
CW
Parameter
setting
value
Pulse symbol
Pulse + direction
The form of pulse input timing parameter is the following form 3.8 below. The 4 times pulse frequency
≤
500kH if 2-phase input form is used.
Table
3.8
the
parameters
of
pulse
input
time
sequence
parameter Differential drive input Single-ended drive input
t
ck
>
2
μ
s
>
5
μ
s
t
h
>
1
μ
s
>
2.5
μ
s
t
l
>
1
μ
s
>
2.5
μ
s
t
rh
<
0.2
μ
s
<
0.3
μ
s
t
rl
<
0.2
μ
s
<
0.3
μ
s
t
s
>
1
μ
s
>
2.5
μ
s
t
qck
>
8
μ
s
>
10
μ
s







































































