























3
Safety logic module FE201
21 of 70
Hardware R2.2.8 11.98.02 en
3
Safety logic module FE201
Incorrect settings of the DIP--FIX switches X1 --X10 can lead to dangerous
malfunctions of the robot in certain circumstances ! Before switching the
controller on, it is therefore imperative to check the settings of the DIP--FIX
switches X1 -- X10 again according to the adjustment instructions in this
section!
If these instructions are not observed there is a risk of extensive damage to the
robot !
3.1
Function blocks
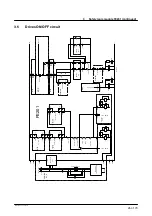
Module FE201 serves to implement the safe switch--off function and the Drives ON circuit.
It comprises:
-- Voltage monitoring for 27 V
-- Dual--channel EMERGENCY STOP circuit
-- EMERGENCY STOP delay
-- Dual--channel user safeguard (operator safety and enabling circuit)
-- Operating mode switchover (Test / Automatic)
-- Drives ON circuit
3.1.1
Settings
To ensure the safe functioning of the robot, it must be checked that the DIP--FIX
switches have the following settings before the robot is put into operation:
--X1 -- X6
These DIP--FIX switches serve the purpose of setting the EMERGENCY STOP delay in
Automatic mode.
X1 and X4
X2 and X5
X3 and X6
Emergency Stop
X1 and X4
X2 and X5
X3 and X6
Emergency Stop
delay
closed
closed
closed
0.5 s
closed
closed
open
0.7 s
closed
open
open
1.0 s
open
open
open
1.3 s
(default setting)
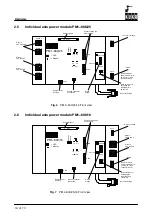
--X7 -- X9
X7 -- X9
External axes
closed
not present (default setting)
open
present
--X10
(version B only)
Position “b” (default setting)
Emergency Stop switch--off without path--
oriented braking
Position “a”
Emergency Stop switch--off with path--
oriented braking
Summary of Contents for KR C1
Page 1: ...Hardware R2 2 8 11 98 02 en 1 of 70 SOFTWARE KR C1 Hardware Release 2 2...
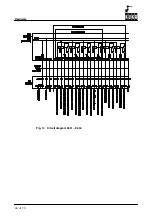
Page 30: ...Hardware 30 of 70 Hardware R2 2 8 11 98 02 en Fig 13 Circuit diagram X931 X604...
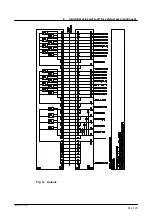
Page 32: ...Hardware 32 of 70 Hardware R2 2 8 11 98 02 en Fig 15 Inputs...
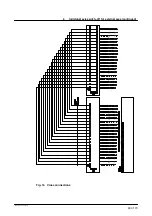
Page 34: ...Hardware 34 of 70 Hardware R2 2 8 11 98 02 en...
Page 35: ...35 of 70 Hardware R2 2 8 11 98 02 en...







































































