





























72
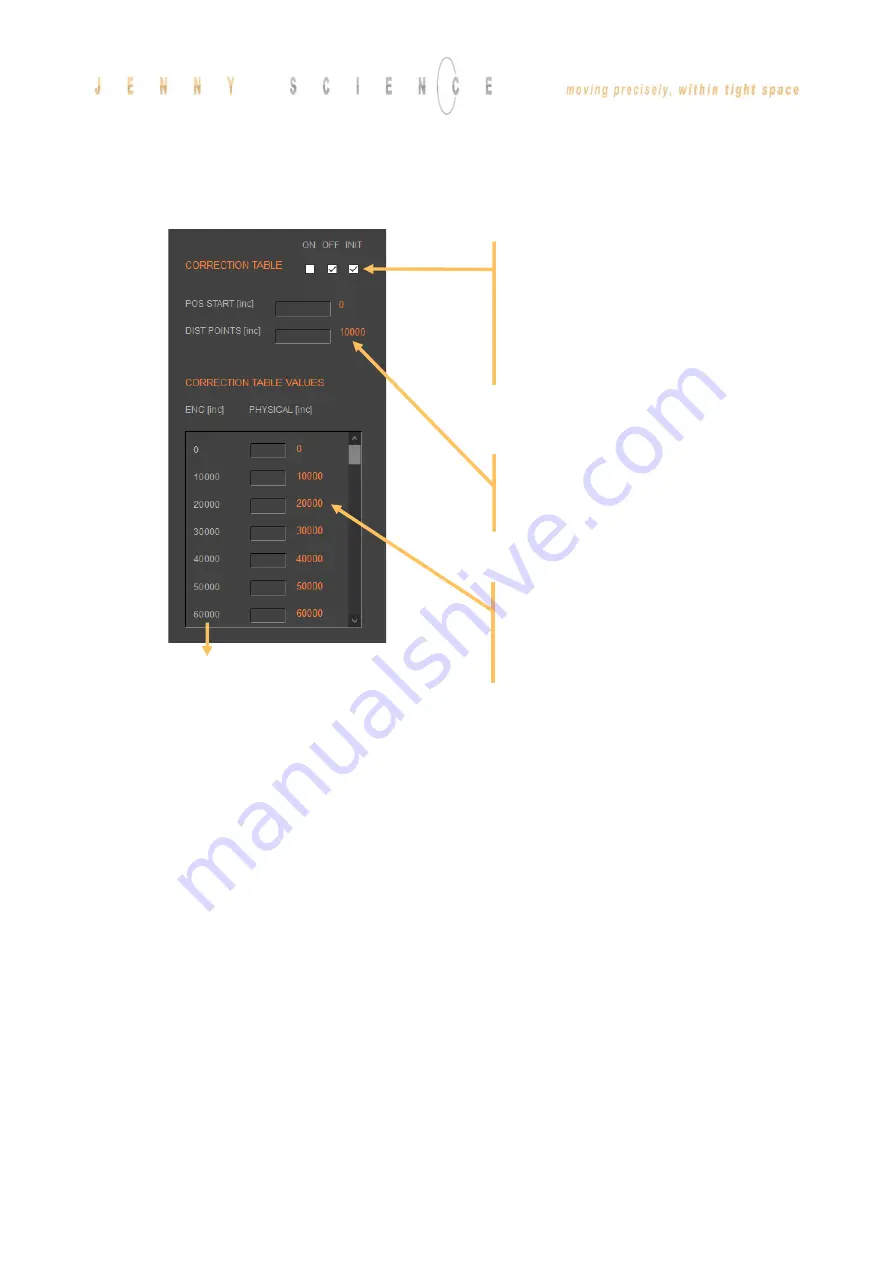
Input the correction values with WebMotion®:
With the navigation
setup/reference
in case of
LINAX® or ELAX®
Notes to correction table:
•
For the positions outside of the correction table, the
correction of the first respectively the last entry in
the correction table holds valid. For example, the
last entry
is „ENC:100‘000
-
> PHYSICAL 100‘017“, so
for the encoder position of 110‘000 the phy
sical
value of 110‘017 is considered.
•
The position values between the table entries are
interpolated.
•
The correction table is saved in the application data
of the XENAX® servo controller.
•
After a reset of the XENAX® servo controller
(command “RES”), the
correction table will be
initialized and deactivated (physical position =
encoder position).
•
During the measurement of the physical position
values, the correction table has to be deactivated.
Encoder Position (automatically
generated from POS SSTART
and DIS POINTS)
Physical absolute Position, measured with laser
interferometer.
If you enter a G8000 by command, and the laser
interferometer reads the physical position 8011,
you can put it in the table and press ENTER to
take it over to the table.
INIT
Initialize correction table, physical position
value = encoder value
OFF
Correction not active, moving commands refer to
encoder position value
ON
Correction table active, moving commands refer
to physical position value
POS START
Startposition of correction table.
DIST POINTS
Distance between data entries in
correction table







































































