





























CHV180 series frequency inverter special for elevator Detailed function description
.47.
steady-state-oscillation, and maybe the speed static will occur.
Speed loop parameter PI has strong relationship with the system’s inertia, in order to
meet the requirement of any situation; the PI should be adjusted based on the default
set when the load of the system changed.
P3.02 and P3.06 are filter times of motor speed detection which need not to be
adjusted, increase the values if there is current noise when motor is running.
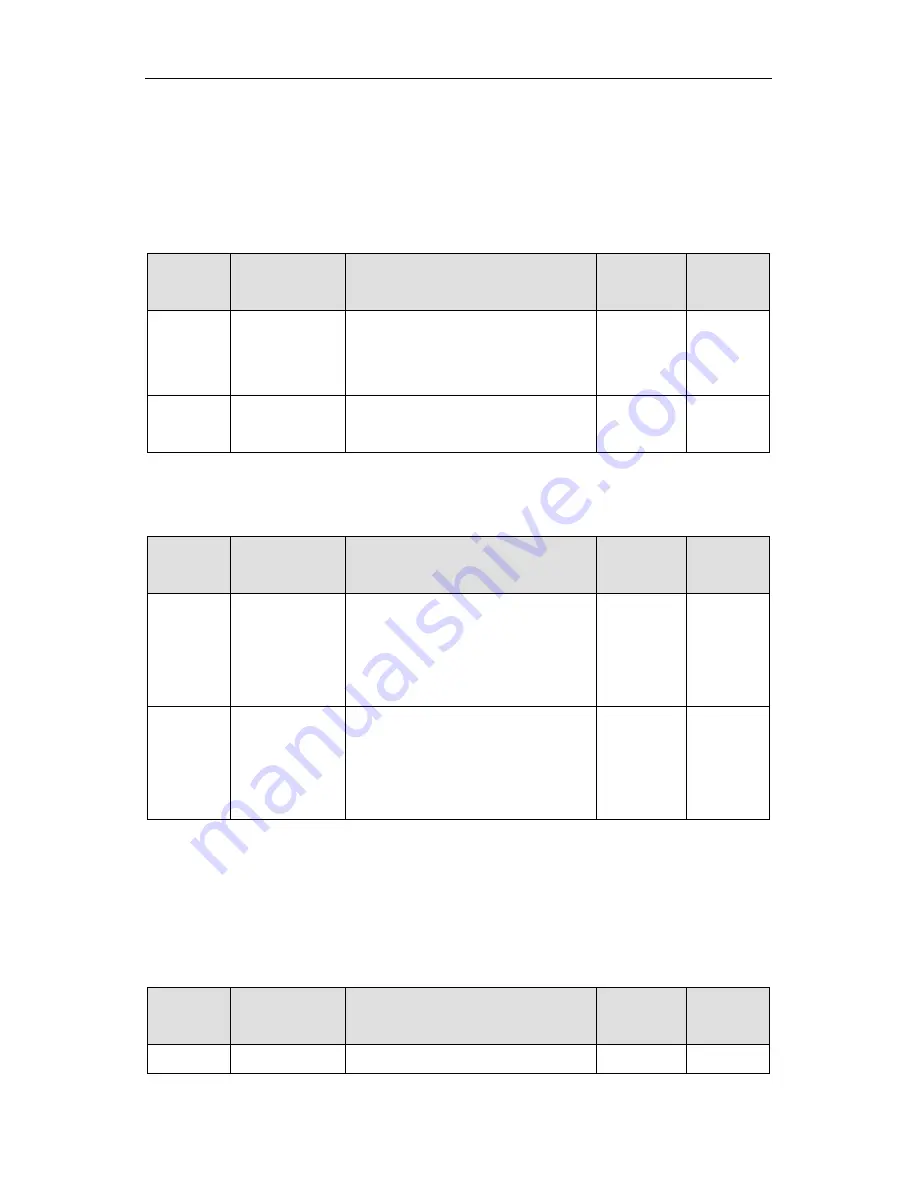
Function
Code
Name
Description
Setting
Range
Factory
Setting
P3.08
ACR
proportional
gain P
0~65535
0~65535
1600
P3.09
ACR integral
gain I
0~65535
0~65535
300
Note: The above parameters are related to the ACR adjustment, which directly
affects the dynamic response and control accuracy if the system. Generally, the
user can not modify the value.
Function
Code
Name
Description
Setting
Range
Factory
Setting
P3.10
Slip
compensation
rate of drive
side
50.0~200.0%
50~200
100%
P3.11
Slip
compensation
rate of trig
side
50.0~200.0%
50~200
100%
The parameter is used to adjust the slip frequency of vector control and improve the
precision of speed control. Properly adjusting this parameter can effectively restrain
the steady-state error.
CHV180 series inverter can set electromotion state and regenerate brake state
separately; P3.10 is suitable for electro motion state. P3.11 is suitable for regenerate
feedback state.
Function
Code
Name
Description
Setting
Range
Factory
Setting
P3.12
Torque upper 0.0~200.0%
0.0~200.0
150.0%







































































