





























Version 3.05
| Optidrive Eco User Guide |
47
www.invertekdrives.com
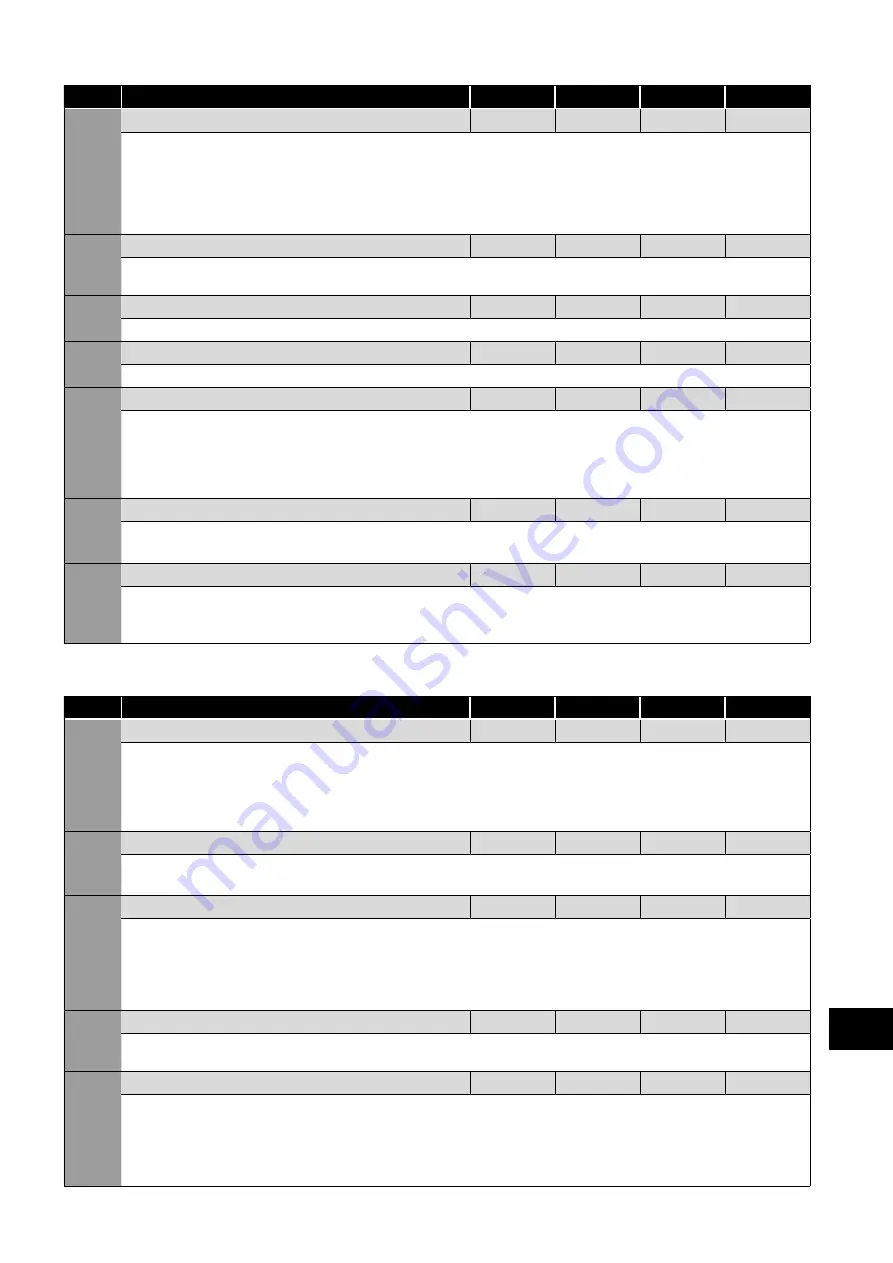
Par
Parameter Name
Minimum
Maximum
Default
Units
P4-03 Vector Speed Controller Proportional Gain
0.1
400.0
50.0
%
Sets the proportional gain value for the speed controller. Higher values provide better output frequency regulation and response. Too
high a value can cause instability or even over current trips. For applications requiring best possible performance, the value should
be adjusted to suit the connected load by gradually increasing the value and monitoring the actual output speed of the load until the
required dynamic behaviour is achieved with little or no overshoot where the output speed exceeds the setpoint.
In general, the factory set value will be suitable for most fan and pump applications, higher friction loads can tolerate higher values of
proportional gain, and high inertia, low friction loads may require the gain to be reduced.
P4-04 Vector Speed Controller Integral Time Constant
0.010
2.000
0.050
Seconds
Sets the integral time for the speed controller. Smaller values provide a faster response in reaction to motor load changes, at the risk of
introducing instability. For best dynamic performance, the value should be adjusted to suit the connected load.
P4-05 Motor Power Factor Cos Ø
0.00
0.99
-
-
When operating in Vector Speed motor control mode, this parameter must be set to the motor nameplate power factor.
P4-07 Maximum Torque / Current Limit
0.0
150.0
110.0
%
This parameter defines the maximum current or torque limit used by the drive.
P4-12
Thermal Overload Retention
0
1
1
-
0 : Disabled.
1 : Enabled.
All Optidrives feature electronic thermal overload protection for the connected motor, designed to protect the motor
against damage. An internal overload accumulator monitors the motor output current over time, and will trip the drive if the usage
exceeds the thermal limit. When P4-12 is disabled, removing the power supply from the drive and re-applying will reset the value of the
accumulator. When P4-12 is enabled, the value is retained during power off.
P4-13
Output Phase Sequence
0
1
0
-
0 : U,V,W.
1 : U,W,V.
Direction of motor rotation when operating in a forward direction will be reversed.
P4-14
Thermal Overload Reaction
0
1
1
-
0 : Trip.
When the overload accumulator reaches the limit, the drive will trip on It.trp to prevent damage to the motor.
1 : Current Limit Reduction.
When the overload accumulator reaches 90% of, the output current limit is internally reduced to
100% of P1-08 in order to avoid an It.trp. The current limit will return to the setting in P4-07 when the overload accumulator reaches 10%.
9.4. Parameter Group 5 – Communication Parameters
Par
Name
Minimum
Maximum
Default
Units
P5-01
Drive Fieldbus Address
1
63
1
-
Sets the Fieldbus address for the Optidrive.
When using Modbus RTU, this parameter sets the Node Address. Refer to section
10.2. Modbus RTU Communications
for further
information. Please note that if a higher Modbus address than 63 is required, P5-16 can be used – see P5-16 for further information.
This parameter also determines the Optibus address of the drive for use with OptiTools Studio.
When Using BACnet MS/TP, this parameter sets the MAC ID. Refer to section
for further information.
P5-03 Modbus RTU / BACnet MSTP Baud Rate
9.6
115.2
115.2
kbps
Sets the baud rate when Modbus/BACnet communications are used.
9.6kbps, 19.2kpbs, 38.4kpbs, 57.6kpbs, 115 kbps, 76.8kbps.
P5-04 Modbus RTU / BACnet MSTP Data Format
-
-
-
-
Sets the expected Modbus telegram data format as follows:
-
:
No Parity, 1 stop bit.
-
:
No parity, 2 stop bits.
-
:
Odd parity, 1 stop bit.
-
:
Even parity, 1 stop bit.
P5-05 Communications Loss Timeout
0.0
5.0
1.0
Seconds
Sets the watchdog time period for the communications channel. If a valid telegram is not received by the Optidrive within this time period,
the drive will assume a loss of communications has occurred and react as selected below (P5-07).
P5-06 Communications Loss Action
0
3
0
-
Controls the behaviour of the drive following a loss of communications as determined by the above parameter setting (P5-06).
0 : Trip & Coast To Stop
1 : Ramp to Stop Then Trip
2 : Ramp to Stop Only (No Trip)
3 : Run at Preset Speed 4
9
Extended P
arameters







































































