





























USER MANUAL
INTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved
59
2.5.6.1. General care
• Always handle the gimbal with care. If you need to tilt the camera manually
(when not connected or while the Intel Falcon 8+ UAV is switched off), please
only do so very cautiously. If too much force is applied, the gear wheels of the
servo motors may break.
• Because the camera is powered by the Intel Falcon 8+ UAV battery in order to
save weight, the camera switches ON or OFF when the UAV is switched ON or
OFF.
• Before landing the Intel Falcon 8+ UAV, please remember to adjust the payload
tilt to 0° to avoid damage to the camera or lens, which would occur if the
payload is pointing downward when the UAV touches the ground.
• Keep the ventilation openings of the payload clean and clear of debris in order
for proper cooling of the compute board.
2.5.6.2. Camera control by the CTR
This section describes how to operate the Sony R10C by using the functional elements
of the Intel Cockpit CTR.
Note
The ON/OFF switch on top of the camera itself has no function.
CAUTION: DO NOT MOUNT LENS HOODS OR SIMILAR ITEMS THAT
ATTACH TO THE FRONT PART OF THE LENS AS THESE MAY BLOCK
THE VIEW OF THE FORWARD LOOKING REALSENSE MODULE OF
THE OBSTACLE AVOIDANCE SYSTEM.
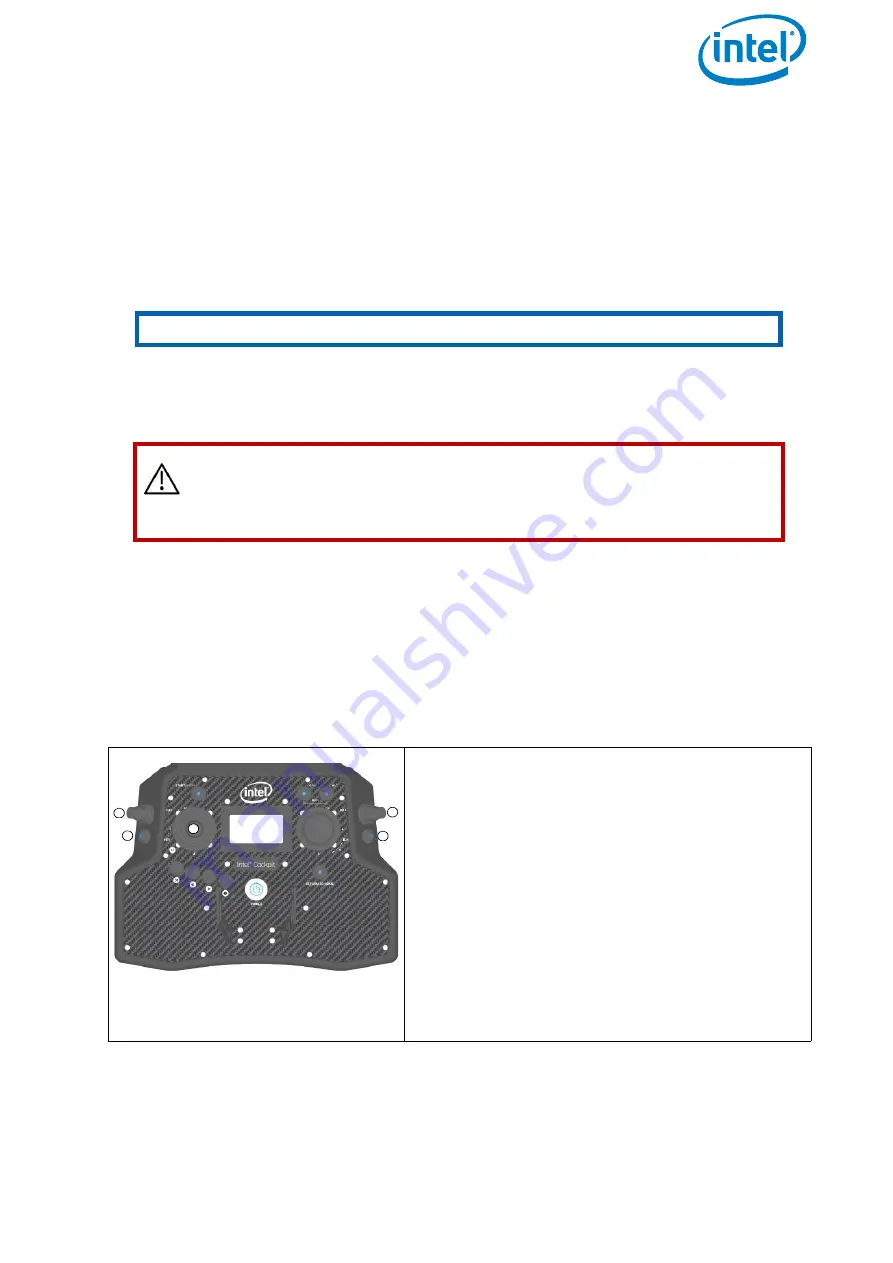
Figure 2.26: Sony R10C CTR control layout
Push Button B1
(1): sets the camera to pre-
defined /-90°, +/-45° and 0° when
Rocker Switch R1
(4) is pushed simultaneously
(see “Setting the Camera Angle” on page 33 for
details).
Rocker Switch R2
(5): by moving this switch up/
down the value of the exposure compensation
can be set.
Push Button B2
(2): pushing this button resets
the exposure compensation to 0.
Push Button B3
(3): photo trigger button
Rocker Switch R1
(4): camera tilt, changes the
angle smoothly.
1
2
3
4
5







































































