





























USER MANUAL
INTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved
47
2.5.4.3. Inspection Payload Control By The Status Display
Push the
ENT
button of the Status Display to enter the menu. Navigate to
Camera
Options
. The following options are available for the Inspection Payload:
Additional cameras may be available. Please check http://intel.com/FalconManual for
an updated version of the manual.
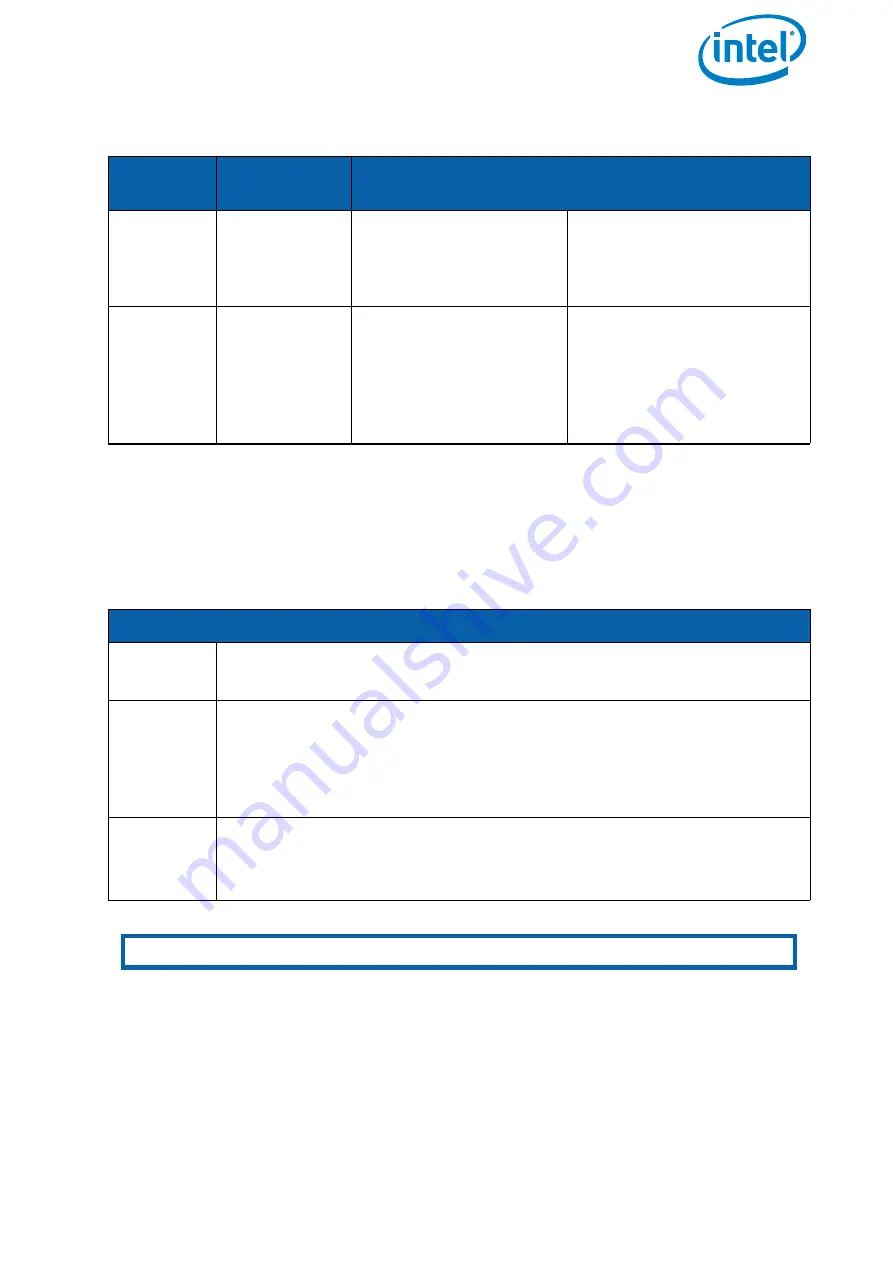
Table 2.4: Inspection Payload: CTR Control Layout
B2
POSITION
ACTIVATED
CAMERA
R2 FUNCTION
1 (LED off) Panasonic
camera
Zoom in/out
Parameters like shutter
speed, aperture and ISO
need to be set directly on
the camera before take-off.
2 (LED on/
red)
FLIR
Up - Trigger flat field
correction
Down - Cycle through
color palette
Parameters like isotherms
and AGC (Automatic Gain
Control) need to be set via
configuration file on the
FLIR SD card before take-
off.
Table 2.5: Inspection Payload Control By Status Display
THE FOLLOWING OPTIONS ARE AVAILABLE FOR THE INSPECTION PAYLOAD:
Switch
Camera
Switches the live image preview on the touchscreen between the FLIR
Tau 2 640 and the Panasonic Lumix camera.
Adjust
Horizon
Occasionally the neutral position of the gimbal's servo motors might
need to be re-adjusted. Use this command to adjust the horizon (roll
angle) while flying. If the system is still on the ground and the motors
are not running this can also be done in both axes (roll and tilt) with the
control sticks, see “Adjusting the camera horizon” on page 37.
Roll
Comp.
On/Off
Default = ON. When
Roll Comp.
= Off, the gimbal will no longer
compensate roll movements of the Intel® Falcon™ 8+ UAV. This can be
useful when doing dynamic video flights.
Notes
Shooting parameters need to be set directly on the camera before take-off.