




















52
SMT-BD1/m
Appendix
5 - ADJUSTMENT TO THE MOTOR
5.1 - CONFIGURATION OF THE MOTOR THERMAL SENSOR
Select jumper MN or OP according to the motor thermal sensor type (PTC or NTC).
5.1.1 - THERMAL SENSOR PTC
On motors equipped with a PTC thermal sensor (triggering on high impedance), the amplifier configuration is the
following: MN jumper closed and OP jumper open. The triggering threshold adjustment for the PTC thermal
sensor is made by means of the PSTH components, as described below : PSTH-D = 14,3 k
Ω
; PSTH-B = 28 k
Ω
;
PSTH-A = 3 x RPTC (120°C) in k
Ω
. RPTC (120°C) = ohmic value of the PTC thermal sensor resistor at 120°C;
the default adjustment is RPTC (120°C)
#
3 k
Ω
with PSTH-A = 10 k
Ω
.
5.1.2 - THERMAL SENSOR NTC
On motors equipped with a NTC thermal sensor (triggering on low impedance), the amplifier configuration is the
following: OP jumper closed and MN jumper open. The triggering threshold adjustment for the NTC thermal
sensor is made by means of the PSTH components, as described below: PSTH-D = 14,3 k
Ω
; PSTH-B = 28 k
Ω
;
PSTH-A = 3 x RNTC (120°C) in k
Ω
. RNTC (120°C) = ohmic value of the NTC thermal sensor resistor at 120°C;
the default adjustment is RNTC (120°C)
#
3 k
Ω
with PSTH-A = 10 k
Ω
.
5.2 - CURRENT LOOPS
5.2.1 - CURRENT LOOPS ADJUSTMENT ON DRIVES WITH 400 VAC SUPPLY
Select the current loop jumpers corresponding to the motor and drive specifications (position B1, B2 or B3).
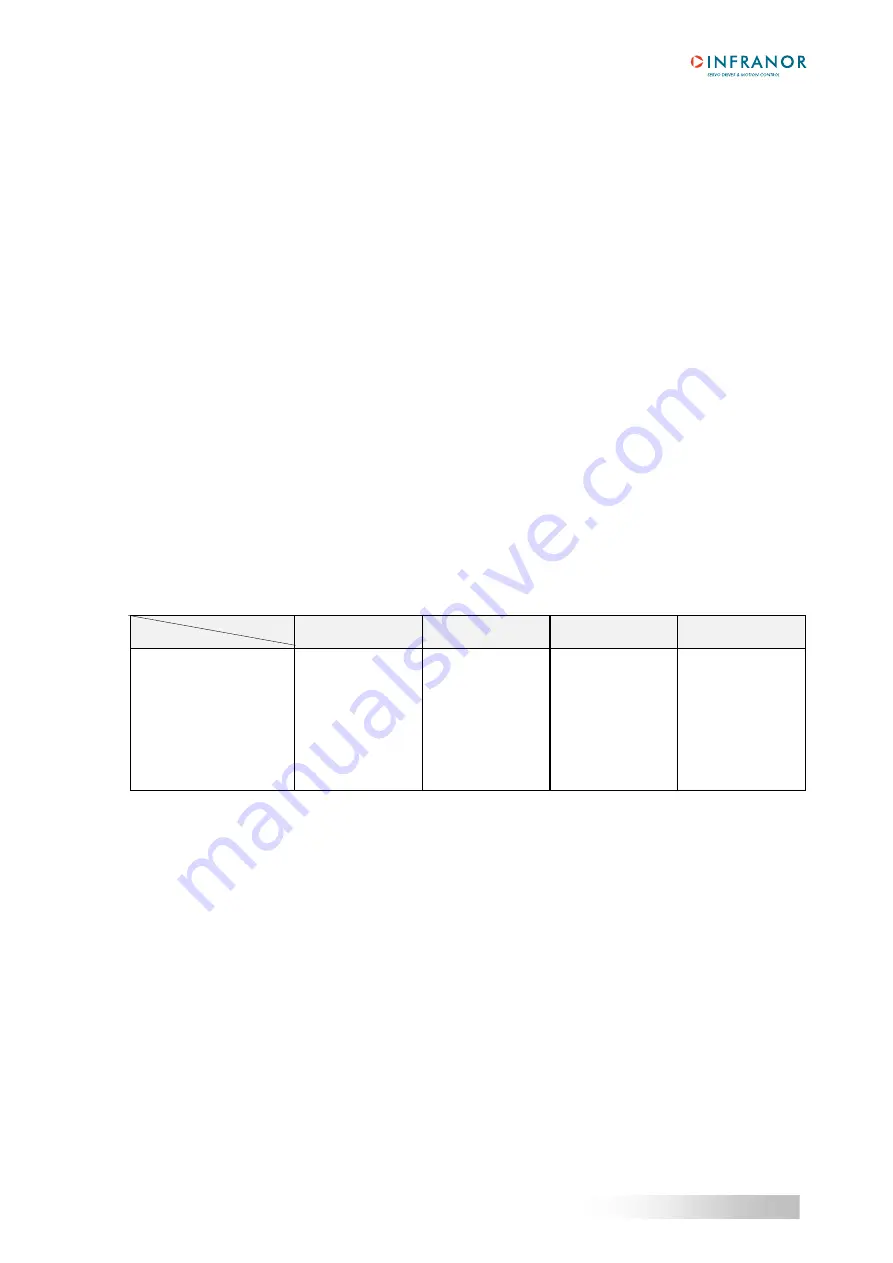
For the 400 VAC range of the MAVILOR BL motors, the current loops adjustment is made according to the table
below:
DRIVE
15 A
30 A
45 A
60A
MOTOR
BL 113
B2
BL 114
B2
BL 115
B2
B1
BL 141
B1
B1
BL 142
B2
B1
BL 143
B1
B1
B1
BL 144
B1
B1
B1
BL 191
B3
B3
BL 192
B3
B3
On other motor types, the current loops are adjusted according to the
drive current rating
and to
the
inductance between the motor terminals
like follows:
15 A and 30 A DRIVES
- Calculation
of
G = 0.8 x Drive current rating (A) x Inductance between phases (mH).
- If
G < 60
, current loop jumpers (x3) on
B3
position.
- If
60 < G < 100
, current loop jumpers (x3) on
B2
position.
- If
G > 100
, current loop jumpers (x3) on
B1
position.
45 A AND 60 A DRIVES
- Calculation
of
G = 0.8 x Drive current rating (A) x Inductance between phases (mH).
- If
G < 100
, current loop jumpers (x3) on
B3
position.
- If
100 < G < 250
, current loop jumpers (x3) on
B2
position.
- If
G > 250
, current loop jumpers (x3) on
B1
position.