





























28
SMT-BD1/m
Chapter 6 – Commissioning
Inputs polarity
: Defines the polarity of the optocoupled inputs START, STOP, JOG+, JOG-, IN1 to IN8: if the box
is marked with "1", the input is active on +24 V.
Sequence control
: The inputs IN1 to IN7 can be used for selecting sequences (checked off). There are
maximum 128 sequences that can be selected this way by the inputs IN1 to IN7 (in all-binary code). The other
inputs can be used for the start condition.
Output polarity
: Defines the polarity of the optocoupled outputs SEQ, POS, SPEED, OK, OUT1 to OUT8: if the
box is marked with "1", the output is active on +24 V.
Output pulse
: the outputs OUT1 to OUT8 can be defined as pulse outputs (checked off) which duration is defined
by the parameter
output pulse duration
(1 to 16000 ms).
New functions
1. Minimum SEQ duration
When activated, this function defines the minimum duration of the SEQ output.
2. Positioning window
When activated, this function defines the position window in which the Pos output is activated (only for a
positioning).
Window = Arrival po/- programmed value.
Note: The window is equal to twice the programmed value.
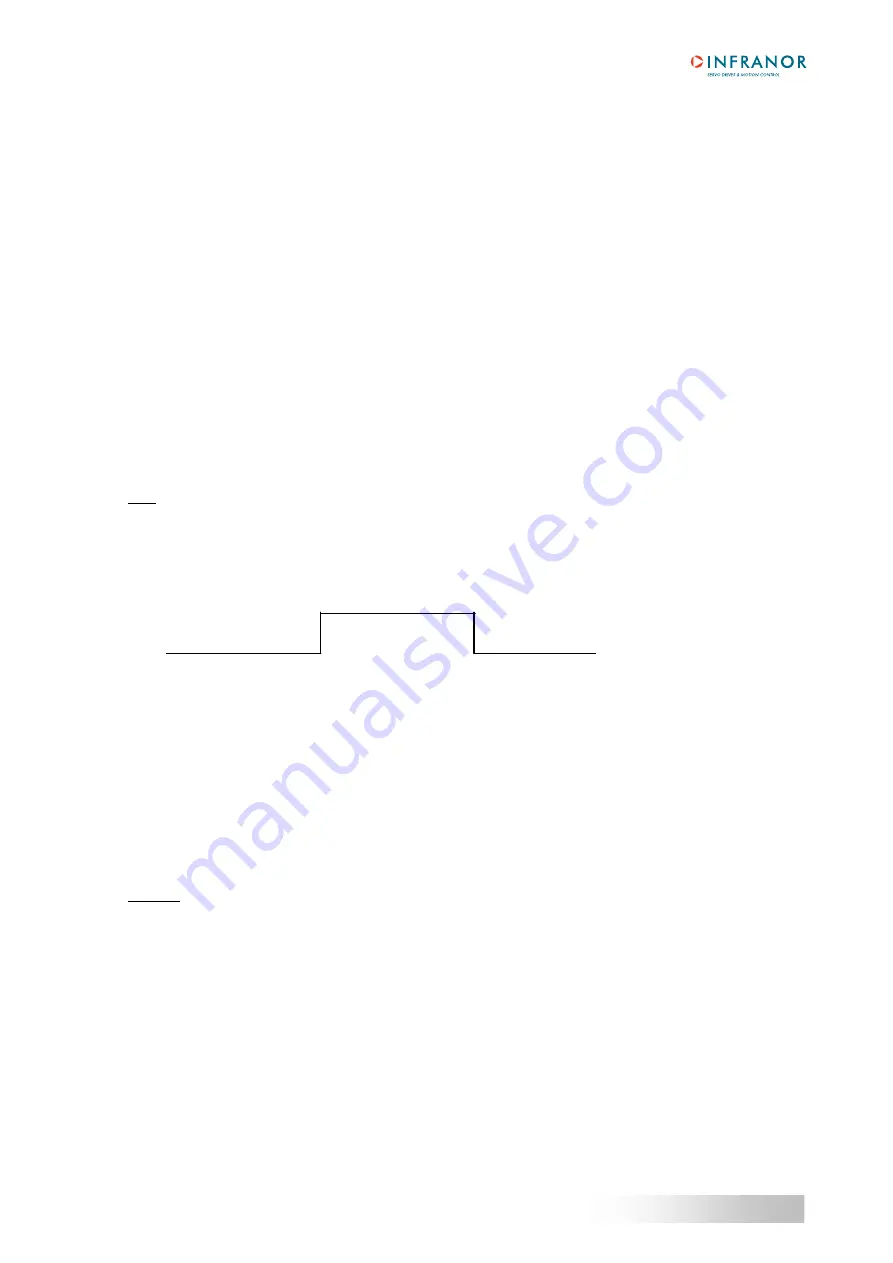
3. Digital CAM
When activated, this function activates the OUT1 logic output when the motor passes an area defined by positions
P1 and P2.
4.3.2 - SCALE PARAMETERS
This menu allows the definition of following parameters:
Position resolution
: defines the position resolution for one motor revolution according to the desired number of
decimals and the desired unit. The value range is between 16 and 65536/rev.
Decimal
: number of decimals.
Unit
: defines the unit used.
Example: For a resolution of 4 mm/motor rev., if the number of decimals = 3, the parameters are:
Resolution = 4000
Decimal
=
3
Unit = mm
Following error threshold
: defines the triggering threshold of the following error.
Dead band
: defines the dead band for the position control.
CLR input enable
: when activated (checked off), allows to use the INDEX input for re-initializing the position
counter: at the inactive-active transition of this signal, the value 0 will be loaded again in the position counter.
Reset counter
: this function allows to reset the position counter when it reaches a pre-defined value. If the value
is set at 0, this function is not activated.
OUT1 output
Motor position
Position P1
Position P2