





























Safet
Introducti
Inst
Pow
Pro Sof
C
How
How
C
S
S
Parame
Drive
D
G
Ind
e
EZMotion User/Programming Guide
85
Revision A8
www.controltechniques.com
FeedRate Decel/Accel
FeedRate Decel/Accel (VirtualMaster.FeedRateDecelerationTime) specifies the ramp used when velocity changes due to a
change in the FeedRate Override value. The units of FeedRate Decel/Accel are seconds/100%. Therefore, the user must
specify the amount of time (in seconds) to accelerate or decelerate 100% of programmed feedrate.
8.4.7
Position View
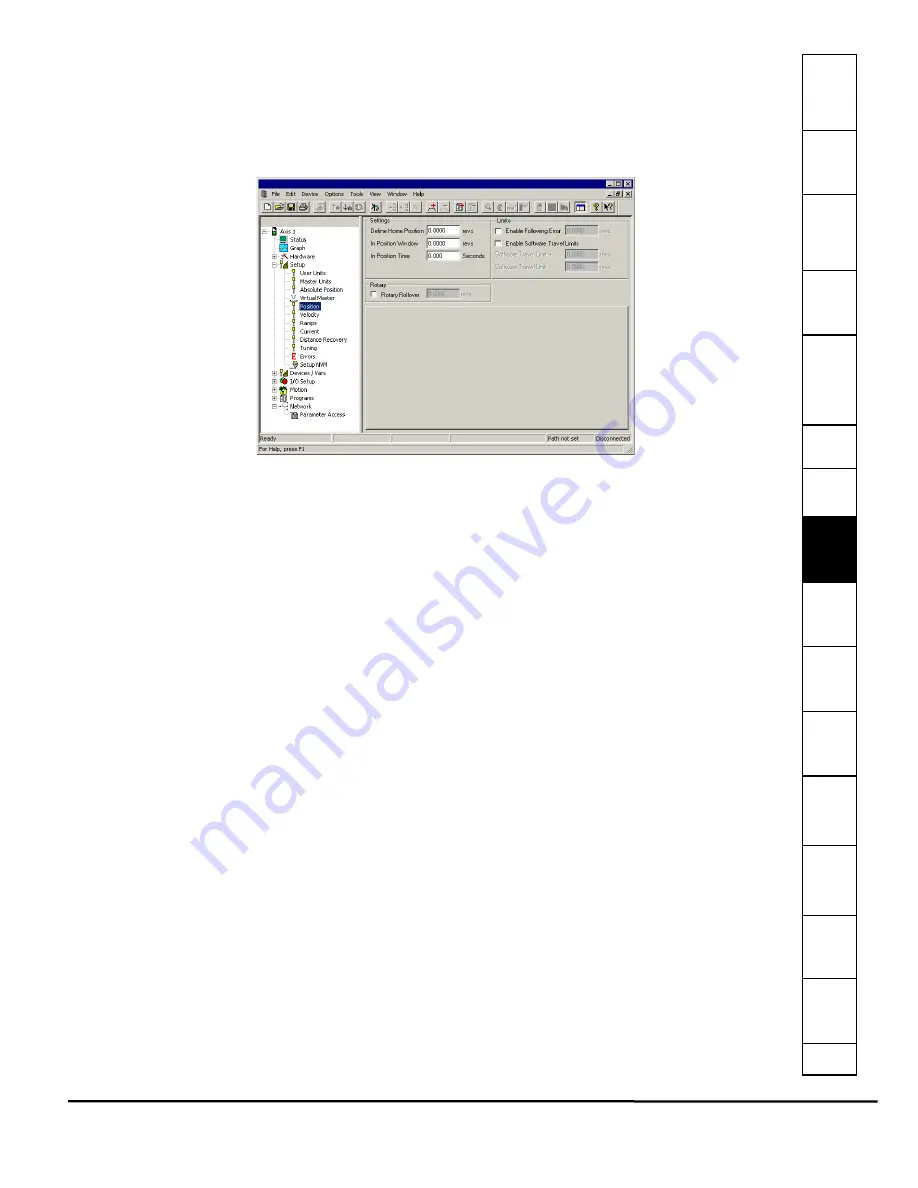
The Position view allows the user to configure parameters related to position control of EZMotion. Figure 85 shows a sample
of the Position view.
Figure 85:
Position View
Settings
Define Home Position
This is the value to which the position command will be set when the Define Home destination is activated. This is used in
applications which do not use a home routine, but require a known reference point. The units are defined on the User Units
view.
In Position Window
The absolute value of the Following Error must be less than or equal to this value at the end of an index in order for the InPosn
source to activate. This window is set in units specified in the User Units view.
Example:
The In Position window is set to 0.0025 revs. At the end of an index, the following error is calculated to be 0.0012 revolutions.
Therefore, the InPosn source will activate.
In Position window is set to 0.001 inches. If at the end of an index, the following error is calculated to be 0.0015 inches, then
the InPosn source will not activate.
In Position Time
This is the amount of time in seconds that commanded motion must be complete and the absolute value of the following error
must be less than the In Position Window for the InPosn source to activate. If set to zero (default), then InPosn will activate as
soon as motion stops and the following error is less than the In Position Window parameter.
Limits
Enable Following Error
Select this check box to enable (or disable if clear) the Following Error Limit. If enabled, a fault will be generated if the absolute
value of the following error ever exceeds the value in the following error parameter. If disabled, a fault will never be generated.
Following Error Limit
Following Error is the difference between the Position Command and the Position Feedback. It is positive when the Position
Command is greater than the Position Feedback. If the absolute value of the following error exceeds the value you enter here,
the drive will generate a Following Error Fault. All accumulated Following Error will be cleared when the drive is disabled.
The Following Error Limit is defined in user units.
Enable Software Travel Limits
Select this check box to enable (or disable if clear) the software travel limits. If clear, the software travel limits are not
monitored.
Software Travel Limit Plus
If the absolute position is greater than or equal to this value the Software Travel Limit Plus Active source shall activate.
A rising edge occurs when the absolute position is greater than or equal to the parameter Software Travel Limit +. A falling
edge will be generated as soon as the above is not true.
Summary of Contents for EZMotion
Page 2: ......
Page 12: ...x EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 18: ...6 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 36: ...24 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 158: ...146 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 186: ...174 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 266: ...256 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 267: ......







































































