





























90
EZMotion User/Programming Guide
www.controltechniques.com
Revision: A8
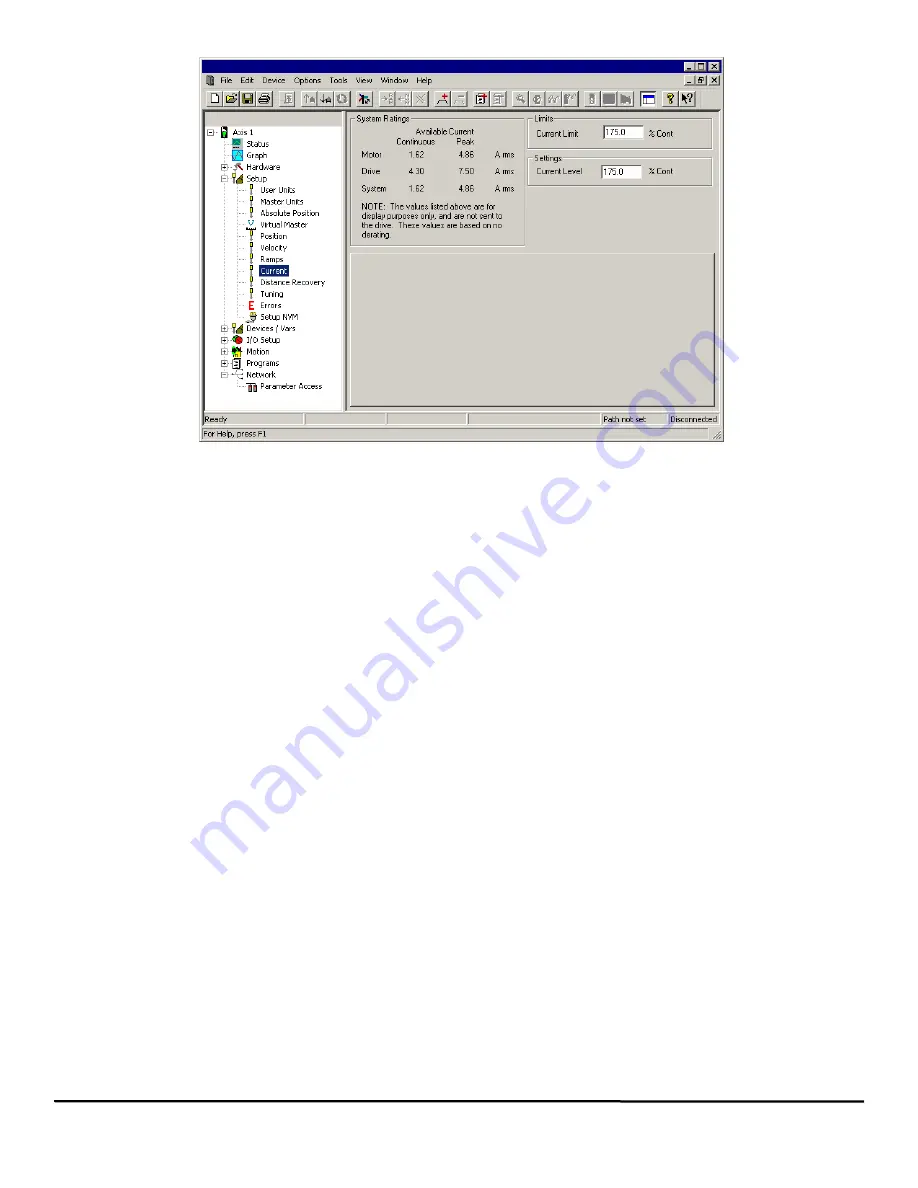
Figure 90:
Current View
System Ratings
This box is used only to show the user what current will be available from the system based on user-entered information. There are
two columns of information based on Continuous and Peak ratings for the different system components and for the system as a
whole. The first row shows the Continuous and Peak current rating for the selected Motor. The next row then shows the ratings for
the Drive itself, which may be higher or lower than those of the motor. The last row called “System” shows the Continuous and Peak
current ratings for the motor/drive combination. The system continuous and peak ratings are the lower of the two motor and drive
ratings. The Current limit on this view is entered in units of % Cont. This means that the limit entered is a percentage of the System
Continuous Current rating. Therefore, if the system continuous current is equal to 15 Amps, and the Current Limit is set to 145%, the
current will actually be limited to 15 x 1.45 = 21.75 Amps (remember the Current Limit Enable must be active to limit the current).
If the Motor current rating is lower than the Drive current rating, then the system is said to be “Motor Limited”. If the Drive current
rating is lower than the Motor current rating, then the system is called “Drive Limited”.
Limits
Current Limit
This parameter sets the value to which the Current Command will be limited when the Current Limit Enable destination is active. To
make the Current Limit always active, assign the Current Limit Enable destination to the Initially Active source on the Assignments
view.
Settings
Current Level
This parameter sets the activation point for the Current Level Active source. If set to 100%, the Current Level Active source will
activate any time the Current Command reaches or exceeds 100% continuous.
8.4.11 Distance Recovery View
When initiating gear or cam using the Master Axis to provide synchronization, distance is lost as we must follow the acceleration
limitations. This distance can be recovered when at velocity by adding a distance recovery index on top of the gear operation or cam.
This view defines the limits of that recovery index.
Gearing uses distance recovery after accelerating from zero to a locked state. Camming uses distance recovery after using the
Summary of Contents for EZMotion
Page 2: ......
Page 12: ...x EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 18: ...6 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 36: ...24 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 158: ...146 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 186: ...174 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 266: ...256 EZMotion User Programming Guide www controltechniques com Revision A8 ...
Page 267: ......







































































